3. SIGNALS AND WIRING
3 - 25
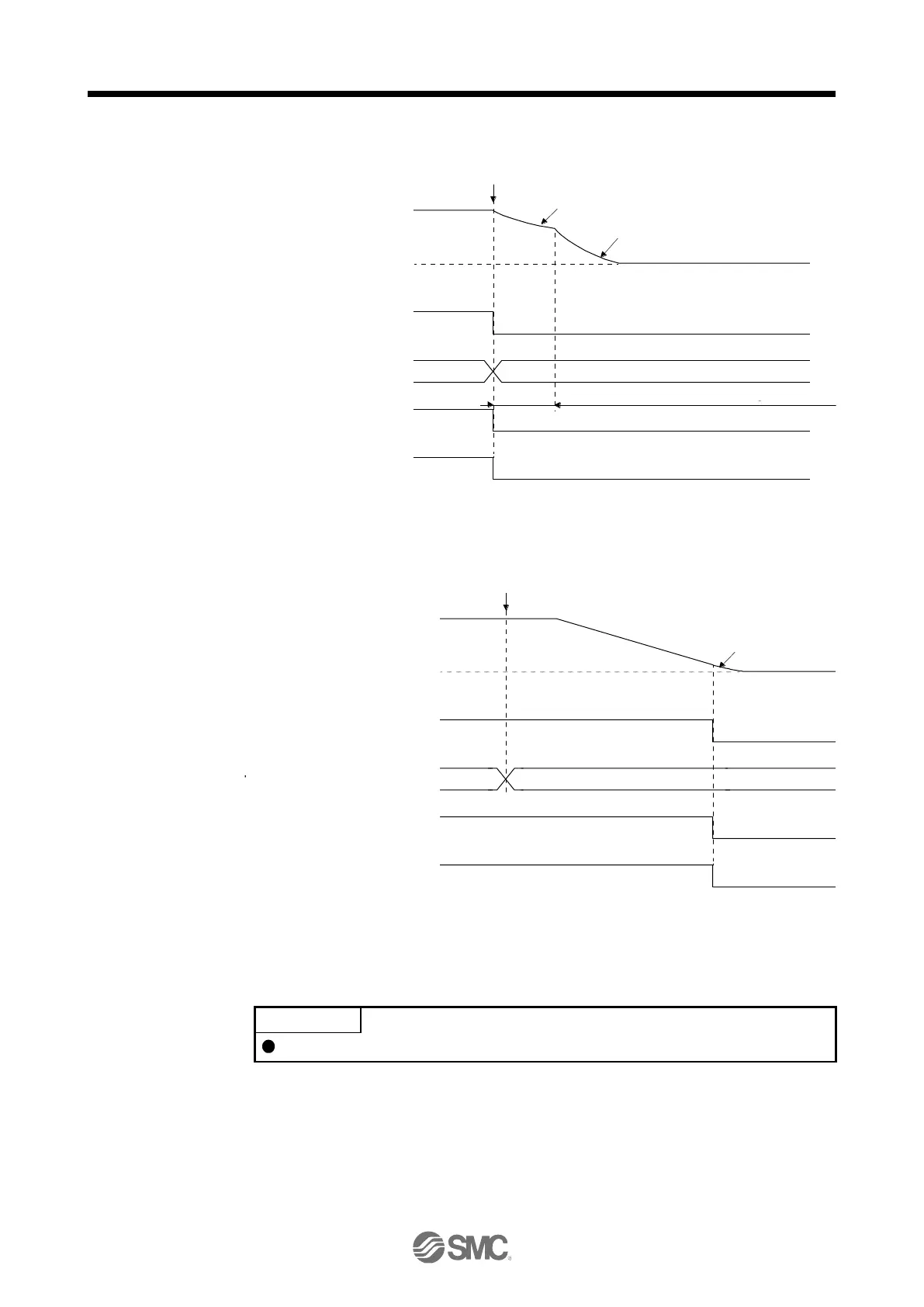
(2) When the forced stop deceleration function is not enabled
MBR
(Electromagnetic
brake interlock)
ON
OFF
ON (no alarm)
OFF (alarm)
Base circuit
(Energy supply to
the servo motor)
ON
OFF
Servo amplifier
display
0 r/min
Servo motor speed
ALM (Malfunction)
No alarm Alarm No.
Braking by the dynamic brake
Dynamic brake
+ Braking by the electromagnetic brake
Operation delay time of the electromagnetic brake
Alarm occurrence
(3) When network communication is shut-off
The dynamic brake may operate depending on the communication shut-off status.
MBR
(Electromagnetic
brake interlock)
ON
OFF
ON (no alarm)
OFF (alarm)
Base circuit
(Energy supply to
the servo motor)
ON
OFF
Servo amplifier
display
0 r/min
Servo motor speed
ALM (Malfunction)
86No alarm (d1)
Network communication
is shut-off.
(Note)
Model speed command 0
and equal to or less than
zero speed
The model speed command is a speed command generated in the driver for forced stop deceleration of the
servo motor.
3.7.2 When you do not use the forced stop deceleration function
To disable the function, set "0 _ _ _" in [Pr. PA04].
The timing chart that shows the servo motor condition when an alarm or network communication shut-off
occurs is the same as section 3.7.1 (2).

 Loading...
Loading...







