7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 19
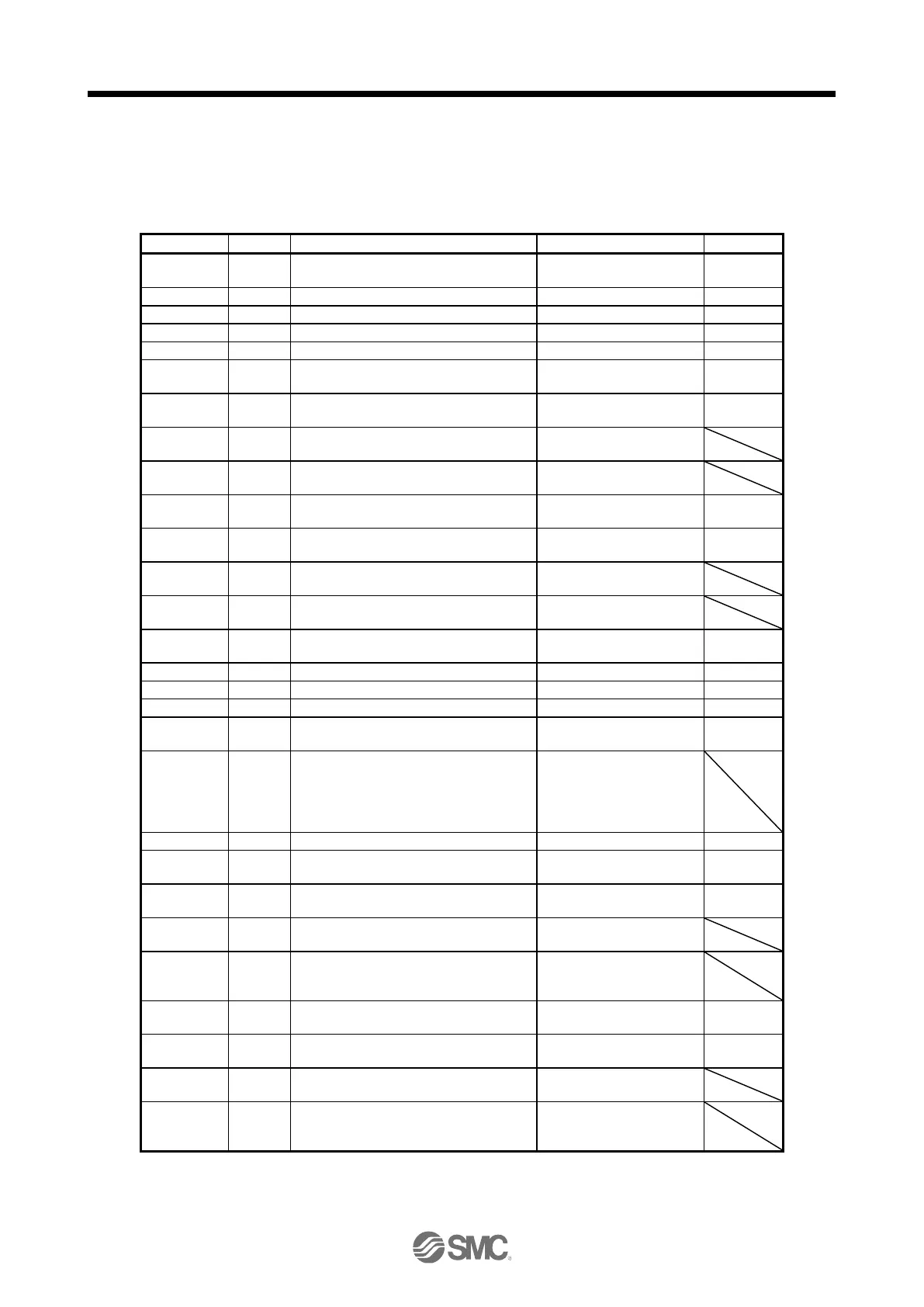
7.2.4 Gain switching procedure
This operation will be described by way of setting examples.
(1) When you choose switching by control command from the PC or PLC…etc
(a) Setting
Load to motor inertia ratio/load to motor
mass ratio
Speed integral compensation
Vibration suppression control 1 - Vibration
frequency
Vibration suppression control 1 -
Resonance frequency
Vibration suppression control 1 - Vibration
frequency damping
Vibration suppression control 1 -
Resonance frequency damping
Vibration suppression control 2 - Vibration
frequency
Vibration suppression control 2 -
Resonance frequency
Vibration suppression control 2 - Vibration
frequency damping
Vibration suppression control 2 -
Resonance frequency damping
Load to motor inertia ratio/load to motor
mass ratio after gain switching
Model loop gain after gain switching
Position loop gain after gain switching
Speed loop gain after gain switching
Speed integral compensation after gain
switching
0001
(Switch by control command
from the controller (C_CDP)
and Input device CDP (Gain
switching).)
Gain switching time constant
Vibration suppression control 1 - Vibration
frequency after gain switching
Vibration suppression control 1 -
Resonance frequency after gain switching
Vibration suppression control 1 - Vibration
frequency damping after gain switching
Vibration suppression control 1 -
Resonance frequency damping after gain
switching
Vibration suppression control 2 - Vibration
frequency after gain switching
Vibration suppression control 2 -
Resonance frequency after gain switching
Vibration suppression control 2 - Vibration
frequency damping after gain switching
Vibration suppression control 2 -
Resonance frequency damping after gain
switching

 Loading...
Loading...







