When alarms not related to the forced stop function occur, control of motor
deceleration cannot be guaranteed. (Refer to chapter 8.)
When network communication is shut-off, forced stop deceleration will operate.
(Refer to section 3.7.1 (3).)
In the torque mode, the forced stop deceleration function is not available.
Disable the forced stop deceleration function for a machine in which multiple
axes are connected together, such as a tandem structure. If an alarm occurs
with the forced stop deceleration function disabled, the servo motor will stop with
the dynamic brake.
Keep the servo-on command (from upper side) and ready-on command (from
upper side) on while EM2 (Forced stop 2) is off. When the servo-on command
(from upper side) or ready-on command (from upper side) is off, forced stop
deceleration, base circuit shut-off delay time, and vertical axis freefall prevention
do not function.
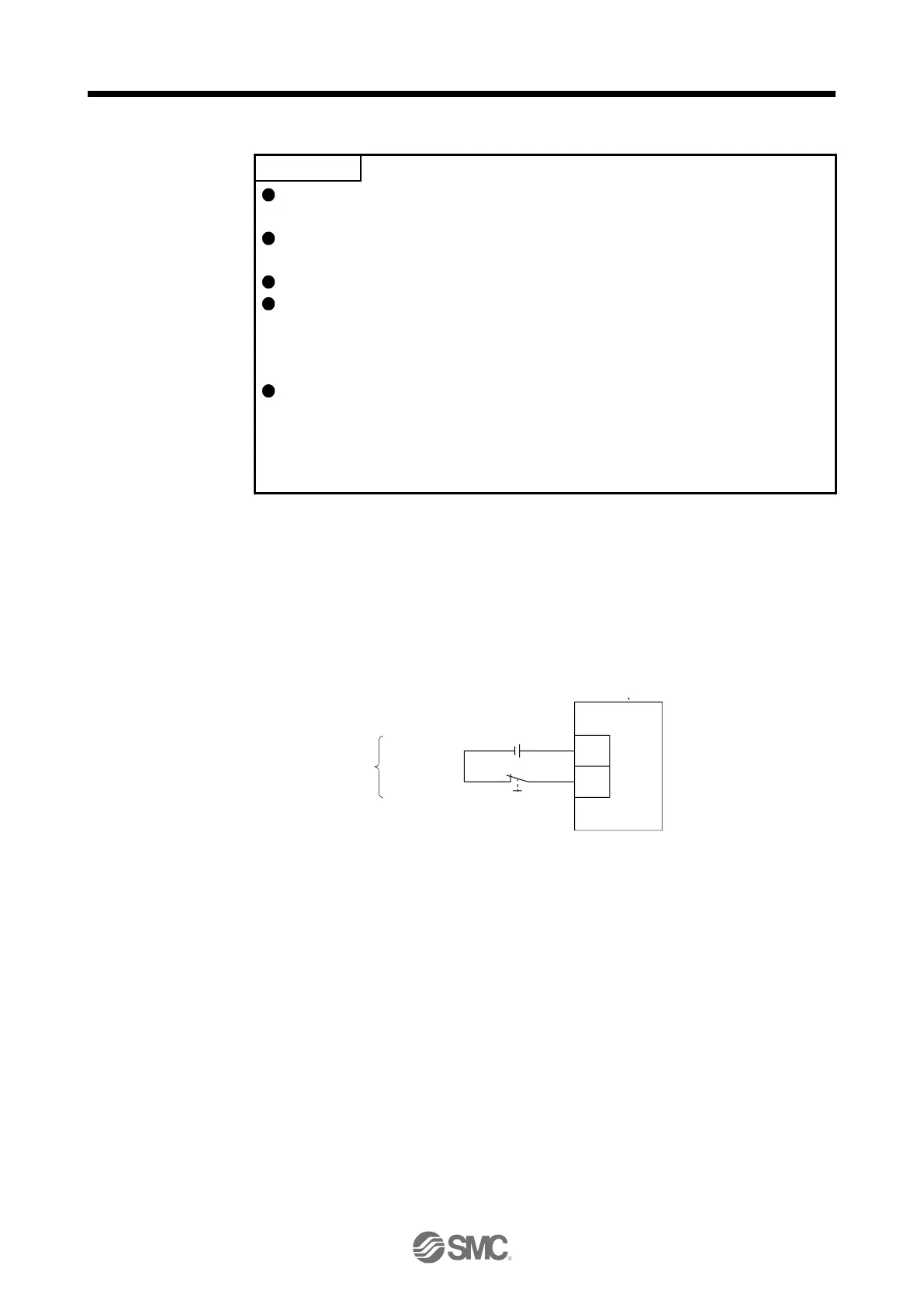
3.6.1 Forced stop deceleration function
When EM2 is turned off, dynamic brake will start to stop the servo motor after forced stop deceleration.
During this sequence, the display shows [AL. E6 Servo forced stop warning].
During normal operation, do not use EM2 (Forced stop 2) to alternate stop and drive. The driver life may be
shortened.
(1) Connection diagram

 Loading...
Loading...







