18.EtherCAT COMMUNICATION
18.6.2 Incremental counter
To protect the operation when a PDO communication error occurs, the incremental counter can be used in
the DC mode. When an incremental counter object has been mapped in the PDO communication, the
detection of [AL. 86.2 Network communication error 2] is enabled. Increment the incremental counter
(download) on the master (upper side) per communication cycle. When incremental counter objects are
mapped to RxPDO and TxPDO, the slave (driver) sends the sum of the received incremental counter value
and 1. Detect an incremental counter update error on the master side (upper side) as necessary.
The incremental counter value is an unsigned integer from 0 to 255 and added per send/receive of the PDO
communication. The value returns to 0 when exceeding 255.
Incremental counter
(download)
Incremental counter
(upload)
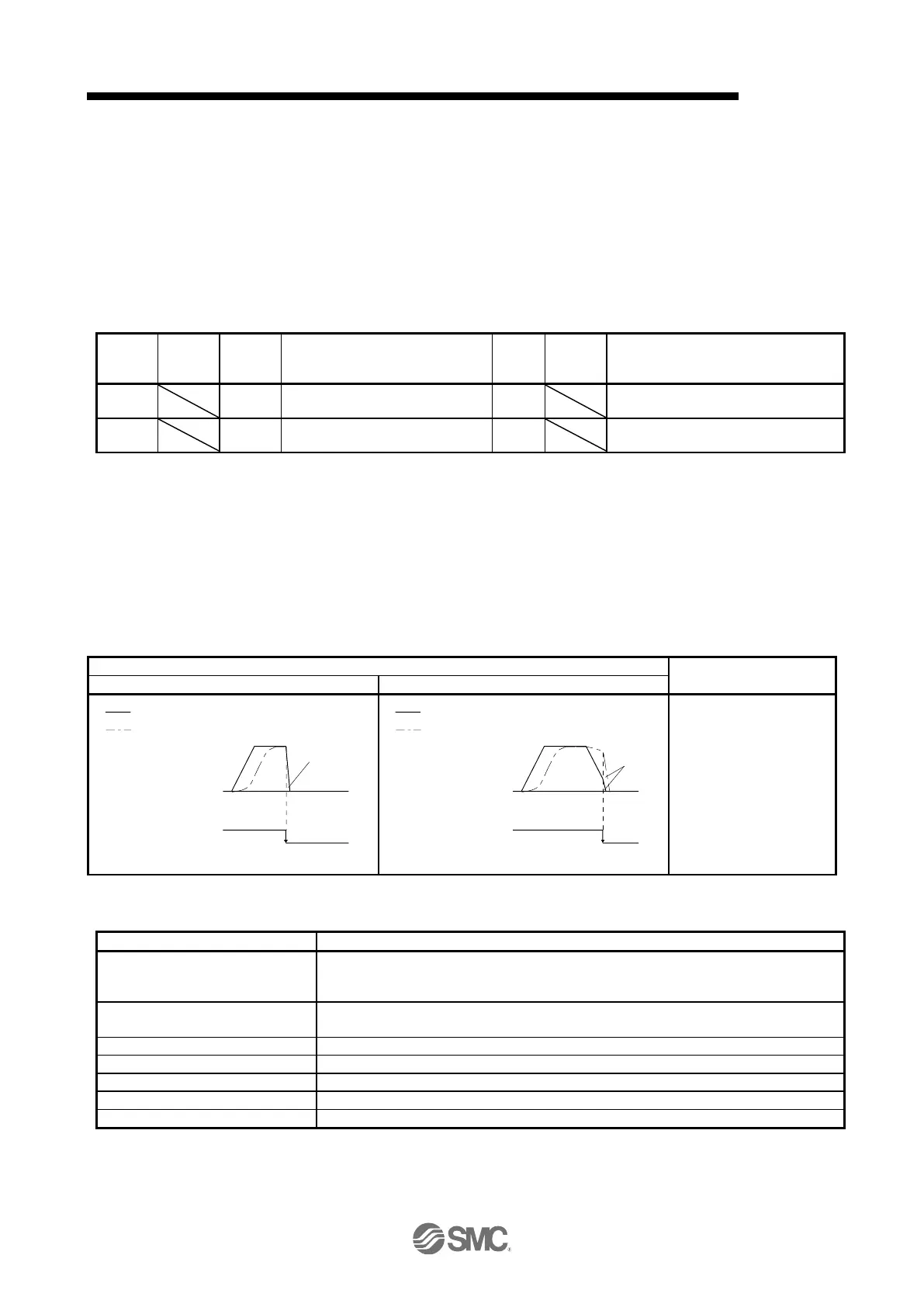
18.6.3 Stroke end
When LSP (Forward rotation stroke end) or LSN (Reverse rotation stroke end) is turned off, a slow stop is
performed by either of the following stop methods.
In the cyclic synchronous position mode (csp), stop the command when the stroke end is detected. When the
command position exceeds by 30 bits from the position where the stroke end is detected, [AL. 69 Command
error] occurs.
When [AL. 69 Command error] has occurred, the home position is erased. Perform a home position return
again.
During rotation at constant speed
During deceleration to a stop
Servo motor speed
0 r/min
(0 mm/s)
ON
OFF
Part of droop
pulses
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
LSP
or
LSN
Servo motor speed
0 r/min
(0 mm/s)
ON
OFF
Part of
droop
pulses
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
LSP
or
LSN
Travels for the droop pulse
portion and stops the servo
motor.
A difference will be
generated between the
command position and the
current position.
Perform a home position
return again.
Perform a return as follows when the stroke end is detected.
Cyclic synchronous position mode
(csp)
After following up Target position (607Ah) with Position actual value (6061h), change the
direction opposite to the limit.
Check that Bit 12 of Statusword (6041h) is 0 before performing the return.
Cyclic synchronous velocity mode
(csv)
Input the speed command of the direction opposite to the limit to Target velocity (60FFh).
Check that Bit 12 of Statusword (6041h) is 0 before performing the return.
Profile position mode (pp)
Input the position command of the direction opposite to the limit to Target position (607Ah).
Profile velocity mode (pv)
Input the speed command of the direction opposite to the limit to Target velocity (60FFh).
Perform operation opposite to the limit with the Jog mode (jg).
Perform operation opposite to the limit with the Jog mode.
Perform operation opposite to the limit with the Jog mode (jg).

 Loading...
Loading...







