3. SIGNALS AND WIRING
3 - 24
3.7 Alarm occurrence timing chart
When an alarm has occurred, remove its cause, make sure that the operation
signal is not being input, ensure safety, and reset the alarm before restarting
operation.
In the torque mode, the forced stop deceleration function is not available.
To deactivate the alarm, cycle the control circuit power, give the error reset command from the upper side, or
perform network communication reset. However, the alarm cannot be deactivated unless its cause is
removed.
3.7.1 When you use the forced stop deceleration function
To enable the function, set "2 _ _ _ (initial value)" in [Pr. PA04].
If an alarm occurs with the forced stop deceleration function disabled, the servo
motor will stop with the dynamic brake.
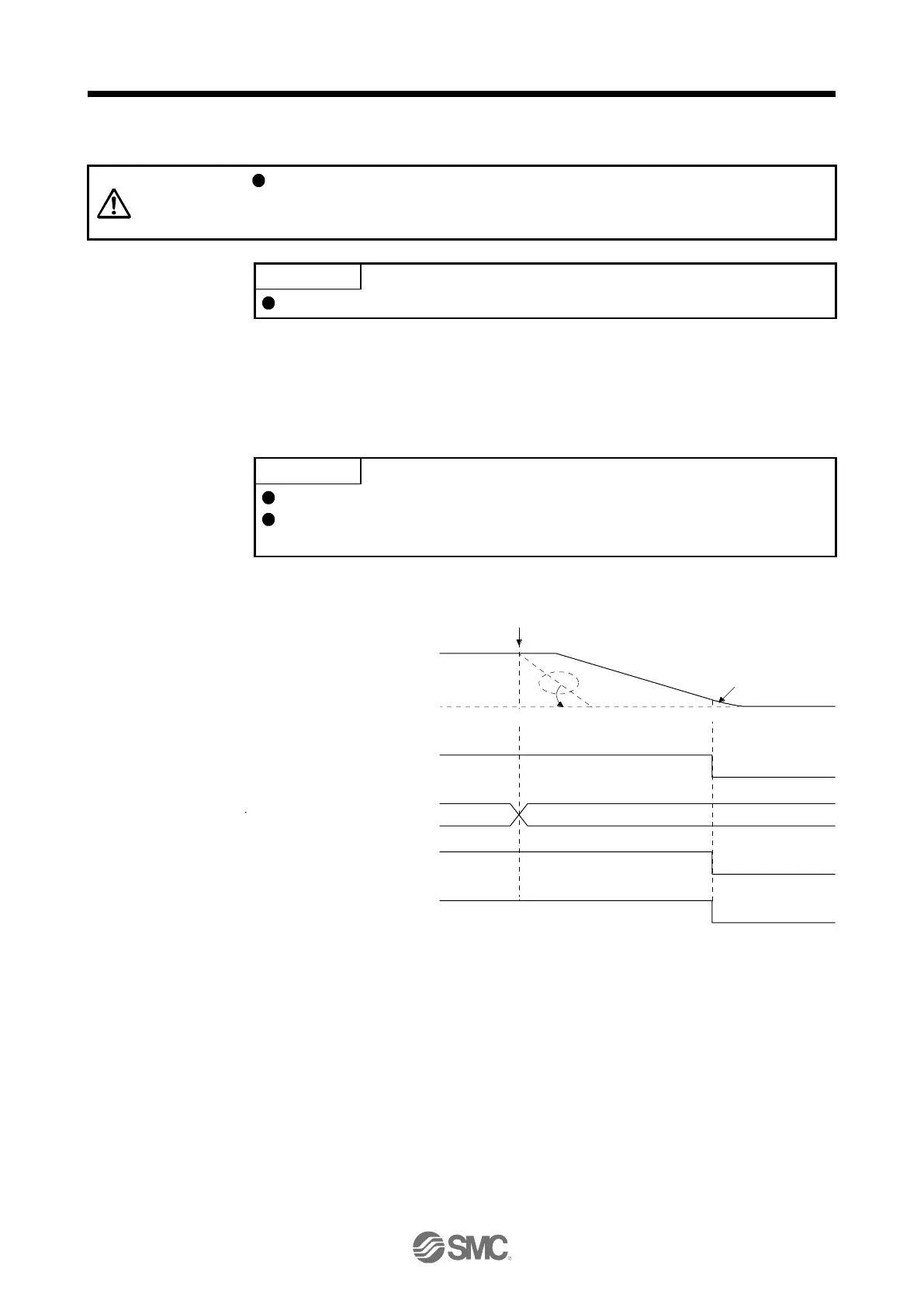
(1) When the forced stop deceleration function is enabled
Alarm occurrence
Alarm No.No alarm
(Note)
Model speed command 0
and equal to or less than
zero speed
MBR
(Electromagnetic
brake interlock)
ON
OFF
ON (no alarm)
OFF (alarm)
Base circuit
(Energy supply to
the servo motor)
ON
OFF
Servo amplifier
display
0 r/min
Servo motor speed
ALM (Malfunction)
Controller command is not received.
The model speed command is a speed command generated in the driver for forced stop deceleration of the
servo motor.

 Loading...
Loading...







