18.EtherCAT COMMUNICATION
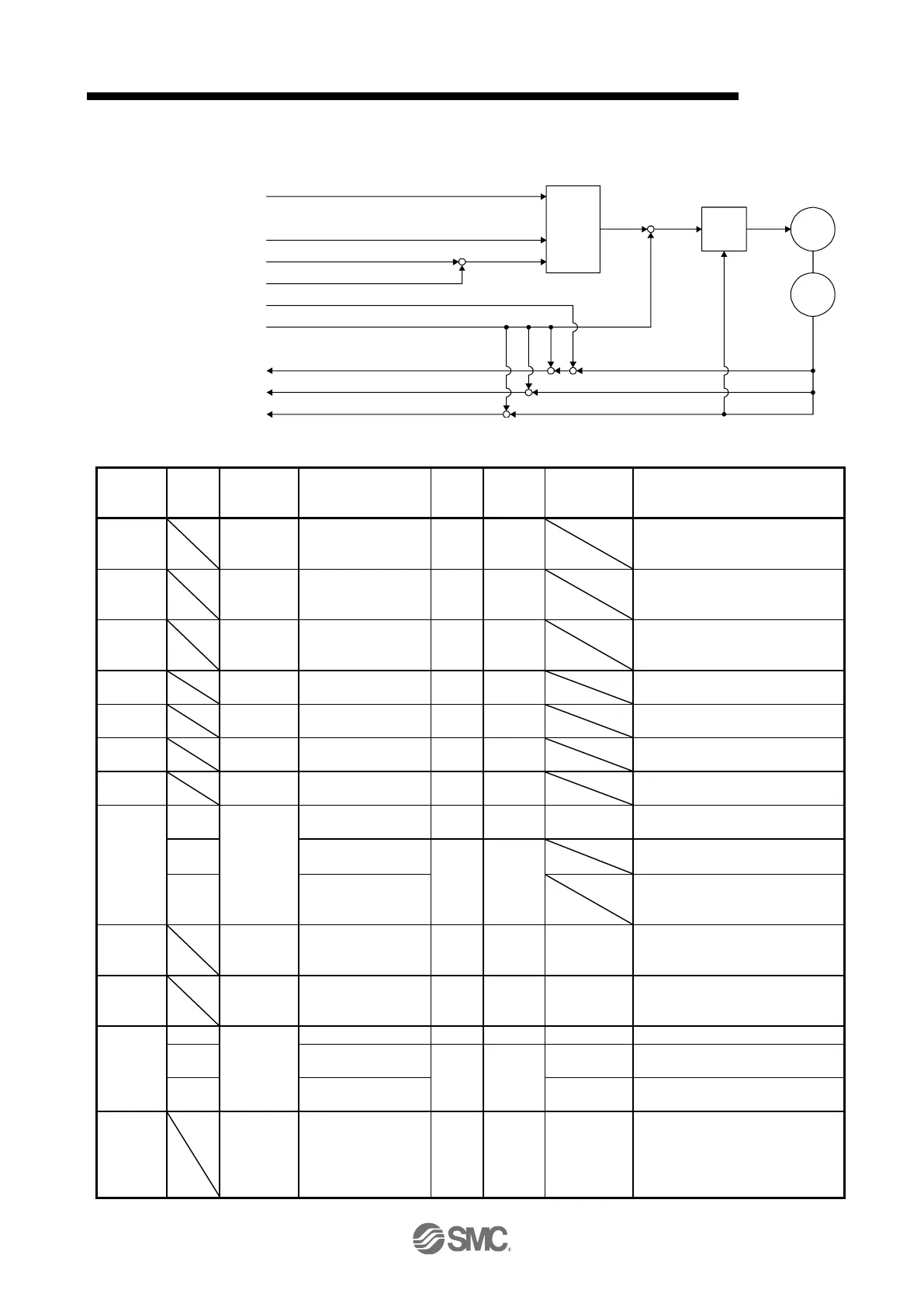
18.5.4.5 Cyclic synchronous torque mode (cst)
The following shows the functions and related objects of the cyclic synchronous torque mode (cst).
Torque
limit
function
×
×
× ×
Position actual internal value
(6063h)
Torque
control
Torque
demand
value
(6074h)
Max torque (6072h)
Target torque (6071h)
Position actual value (6064h)
Gear ratio (6091h)
Polarity (607Eh)
Velocity actual value (606Ch)
Torque limit value (60E0h, 60E1h)
Torque actual value (6077h)
Motor
Encoder
×
Torque offset (60B2h)
+
+
Command torque
Unit: 0.1% (rated torque of
100%)
Maximum torque
Unit: 0.1% (rated torque of
100%)
Command torque (after limit)
Unit: 0.1% (rated torque of
100%)
Position actual
internal value
Current position (Enc inc)
Current position (Pos units)
Current speed Unit: Vel unit (0.01
r/min or 0.01 mm/s)
Current torque Unit: 0.1% (rated
torque of 100%)
Travel distance per revolution of
an output shaft
Travel distance
Refer to section 7.3.14 (4).
Number of servo motor shaft
revolutions
Refer to section 7.3.14 (4).
Positive torque
limit value
Torque limit value (forward)
Unit: 0.1% (rated torque of
100%)
Negative torque
limit value
Torque limit value (reverse)
Unit: 0.1% (rated torque of
100%)
Number of revolutions of the
servo motor axis (numerator)
Number of revolutions of the
drive axis (denominator)
Polarity selection
Bit 7: Position POL
Bit 6: Velocity POL
Bit 5: Torque POL
Refer to section 5.10.

 Loading...
Loading...







