5. PARAMETERS
5 - 99
5.2.8 Network setting parameters ([Pr. PN_ _ ])
PN01
**NADR
Node
address
setting
Set the node address of the network.
When using the parameter, set the axis selection rotary switch to "00h". The
parameter will be enabled for the EtherCAT.
Setting range: 0000h to FFFFh
PN02
CERT
Sync Error
Counter Limit
setting
Set the time until [AL. 86.1 Network communication error 1] is detected.
0
Refer to
Function
column
for unit.
Sync Error Counter Limit
(Index: 10F1h: 2)
Automatic
setting
(0 _ _ _)
The threshold at which [AL. 86.1] is
detected is automatically set at 7 ms.
The threshold at which [AL. 86.1] is
detected is automatically set at ([Pr.
PN02]/96) ms.
Manual setting
(1 _ _ _)
(Note 1)
Disabled (0) [AL. 86.1] is not detected.
The value of [Pr. PN02] is set. [AL.
86.1] is detected at (([Pr.PN02]/3) x
communication cycle) ms.
If the setting value is set to "0", the servo motor cannot be stopped when a
communication error occurs.
If the setting value is increased, it takes longer for the servo motor to stop
at the occurrence of a communication error. Be careful when changing the
setting value as it may cause a collision.
This parameter corresponds to "Sync Error Counter Limit (Index: 10F1h, Sub:2)".
Setting range: 0 to 32767
PN06
*NOP1
Function
selection N-1
Sync Error Counter Limit setting
0: Automatic setting
1: Manual setting
The threshold at which [AL. 86.1 Network communication error 1] is detected can be
set according to the setting value in this digit and the value of [Pr. PN02]. Refer to
the function column [Pr. PN02] for details.
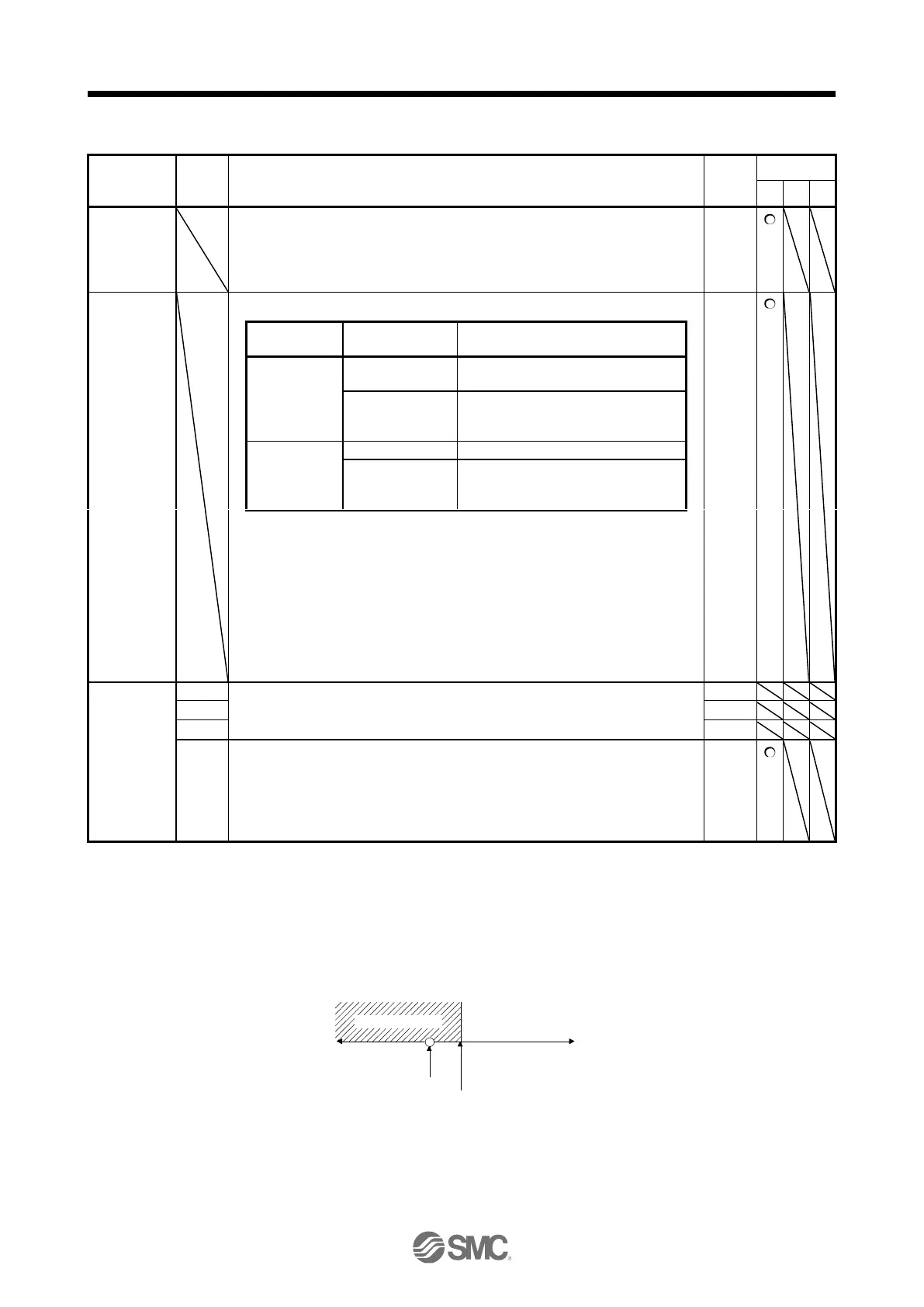
5.3 Software limit
The limit stop with the software limit ([Pr. PT15] to [Pr. PT18]) is the same as the motion of the stroke end.
Exceeding a setting range will stop and servo-lock the shaft. This will be enabled at power-on and will be
disabled in the velocity mode, torque mode, and homing mode (hm). Setting a same value to "Software limit
+" and "Software limit -" will disable this function. Setting a larger value to "Software limit -" than "Software
limit +" will disable this function.
Current position
Travel
impossible
Inhibited range
Softw are limit
Movable range
Travel possible

 Loading...
Loading...







