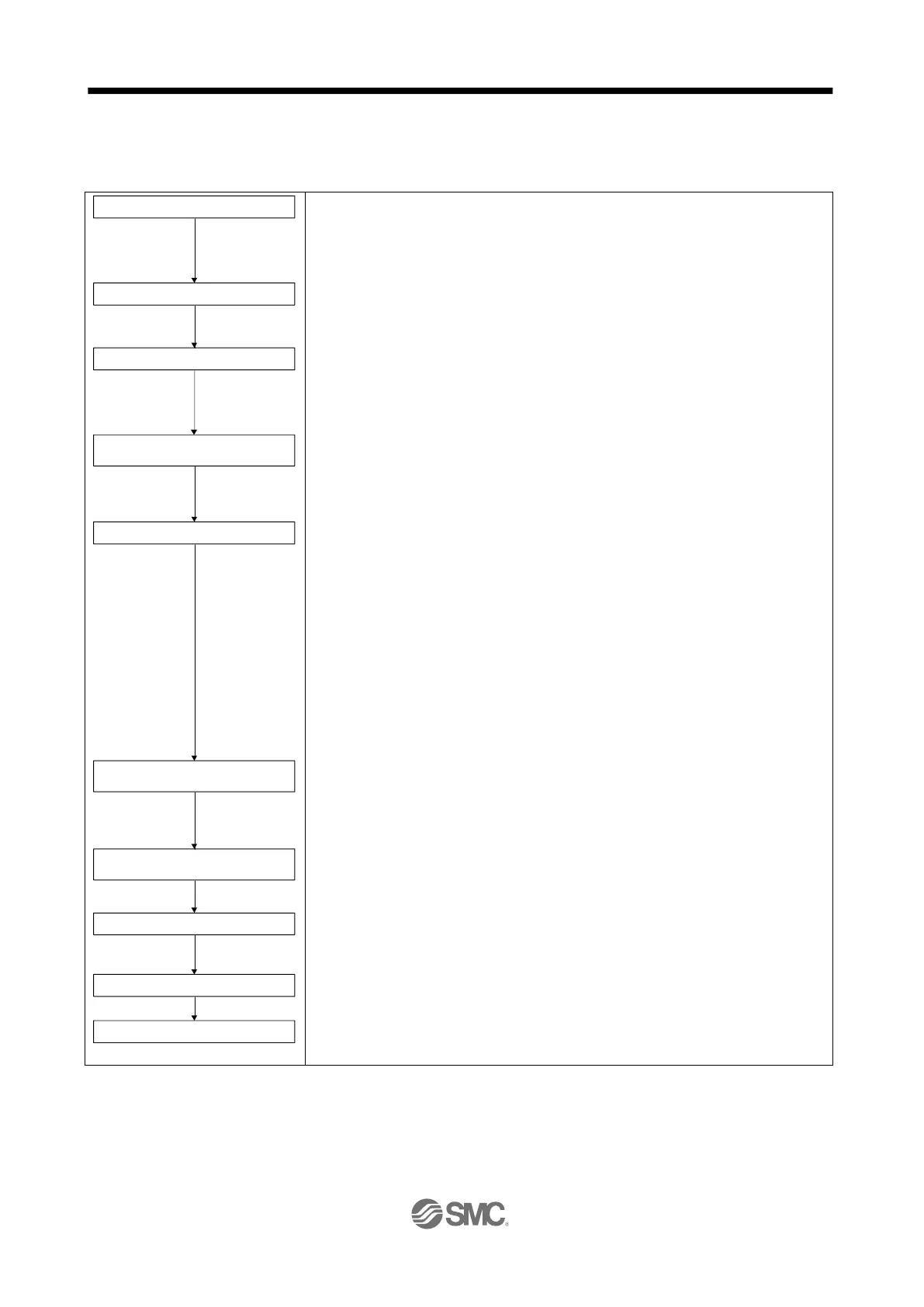
Check whether the driver and servo motor are wired correctly using visual
inspection, DO forced output function (section 4.5.1), etc. (Refer to section
4.1.2.)
Check the surrounding environment of the driver and servo motor. (Refer
to section 4.1.3.)
Set [Pr. PA01] to "_ _ _ 6" (Positioning mode (point table method)). Set
the parameters as necessary for the regenerative option selection, etc.
(Refer to chapter 5.)
With the servo motor disconnected from the machine, use the test
operation mode and check whether the servo motor correctly rotates at
the slowest speed possible. Refer to section 4.5 for the test operation
mode.
Check the network setting to connect the upper side.
1) When using EtherCAT, set the mapping objects of 3rd RxPDO map
(1602h) and 2nd TxPDO map (1A01h) in PDO mapping.
2) When using PROFINET, set the communication format to Telegram
103.
For details, refer to chapter 18,19,20.
For the test operation, with the servo motor disconnected from the
machine and operated, give commands to the driver. Operate the servo
motor at the speed as low as possible and check whether the servo motor
rotates correctly.
Connect the servo motor with the machine, and check machine motions
by transmitting operation commands from the upper side.
Make gain adjustment to optimize the machine motions. (Refer to chapter
6.)
Stop giving commands and stop operation.
Test operation of the servo motor
alone in test operation mode
Wiring check
Surrounding environment check
Parameter setting
Network setting check
Test operation of the servo motor
alone by commands
Test operation with the servo motor
and machine connected
Gain adjustment
Actual operation
Stop

 Loading...
Loading...







