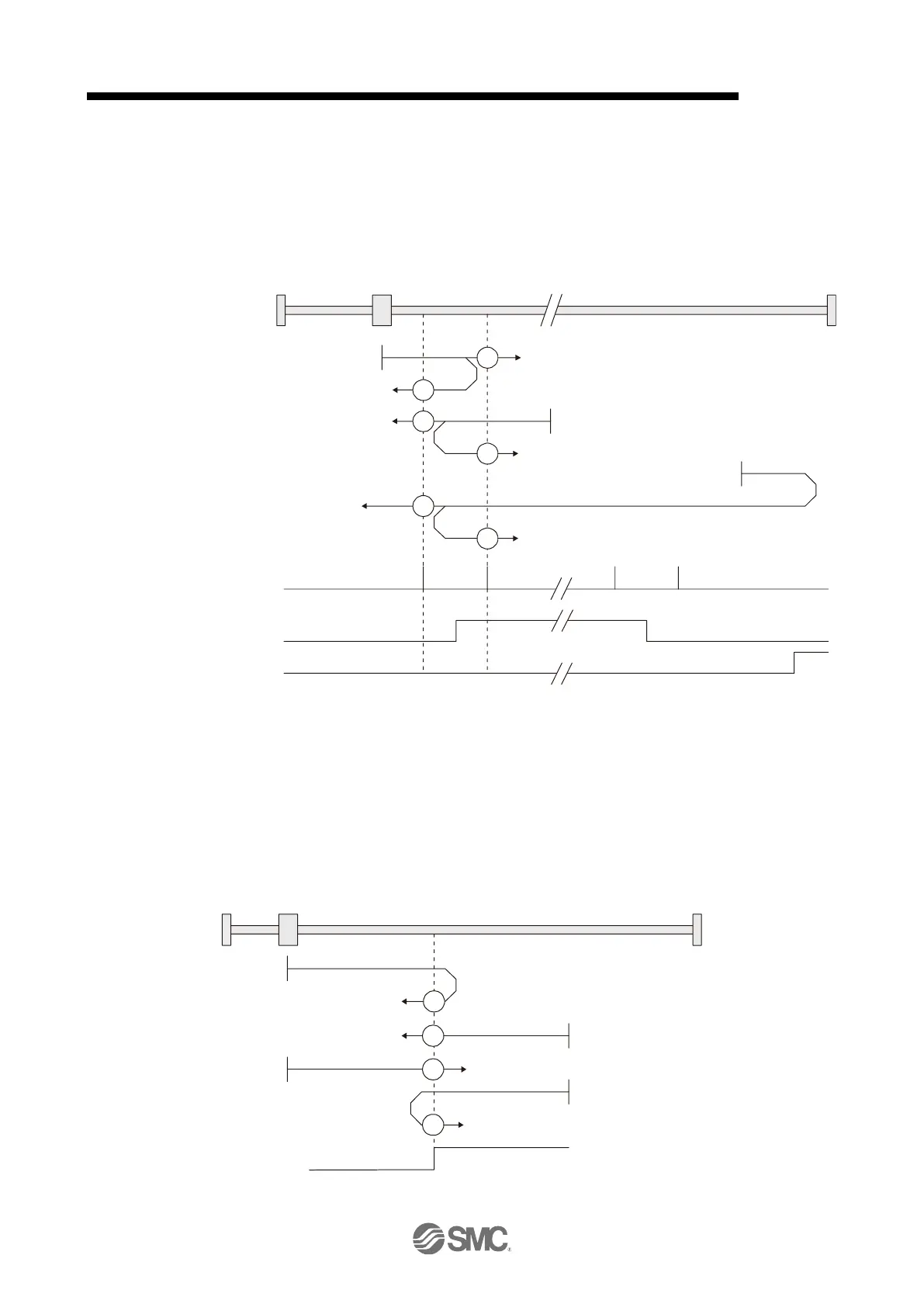
3) Method 7, 8, 11, 12: Homing on home switch and index pulse
These types include the operation at stroke end detection in addition to the operation of Method 3
to Method 6. Thus, the home position is the same as that of Method 3 to Method 6. Method 7 has
the operation of the dog type last Z-phase reference home position return. Method 8 has the
operation of the dog cradle type home position return at a forward rotation start. Method 11 and 12
differ from Method 7 and Method 8 only in the starting direction: the starting direction of Method 11
and 12 is the reversed direction.
4) Method 17 to 30: Homing without index pulse
Method 17 to 30 have the operation of Method 1 to Method 14; however, these types set the home
position not on the Z-phase but on the dog. Method 17 to 30 have the operation of Method 1 to
Method 14; however, these types set the home position not on the Z-phase but on the dog. The
following figure shows the operation of the home position return type of Method 19 and Method
20. Method 19 and Method 20 have the operation of Method 3 and Method 4; however, these
types set the home position not on the Z-phase but on the dog Method 19 has the operation of the
dog type front end reference home position return. Method 20 has the operation of the dog cradle
type home position return; however, the stop position is not on the Z-phase but on the dog.

 Loading...
Loading...







