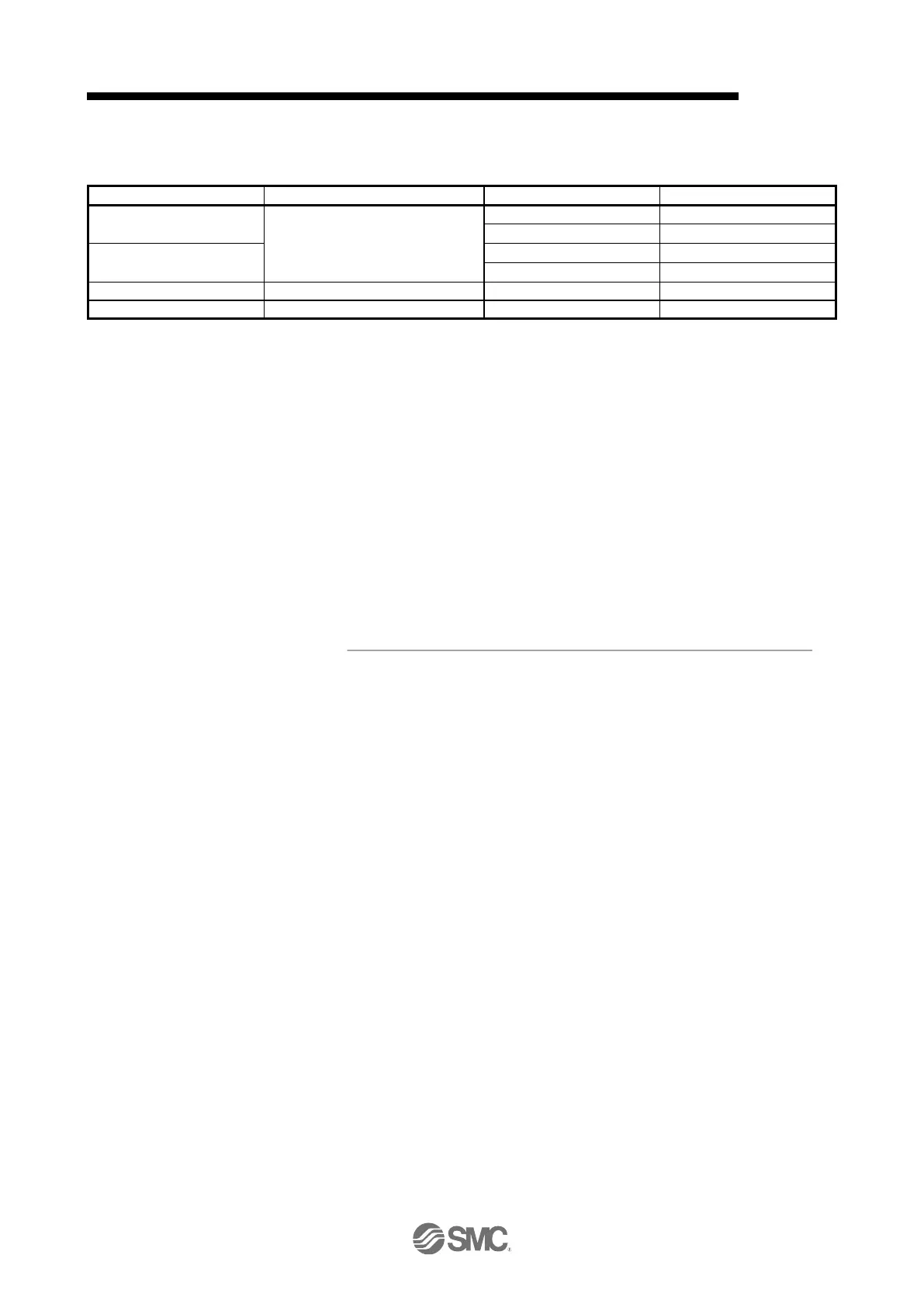
(4) Feed constant (P24722)
The following shows setting values of P24722.0 Feed and P24722.1 Shaft revolutions.
No value can be written to Feed because it is set automatically. Writing a value will be Error No. 02h (Low
or high limit exceeded).
When the command unit is mm or inch, you can change the travel distance per revolution of an output
shaft by changing Shaft revolutions.
The Shaft revolutions setting depends on the setting of "Feed length multiplication [STM]" in [Pr. PT03].
When a value other than the values shown in the table above is set for Shaft revolutions, Error No. 02h
(Low or high limit exceeded) will occur.
When the command unit is degree and pulse, the value of Shaft revolutions will be set automatically as
the table shows. Writing a value will trigger Error No. 02h (Low or high limit exceeded).
Additionally, Position actual value (P24676) is calculated from Gear ratio (P24721) and Feed constant
(P24722) as follows.
Position actual value (P24676) =
Position actual internal value (P24675) × Feed constant (P24722)
Position encoder resolution (P24719) × Gear ratio (P24721)

 Loading...
Loading...







