5. PARAMETERS
5 - 101
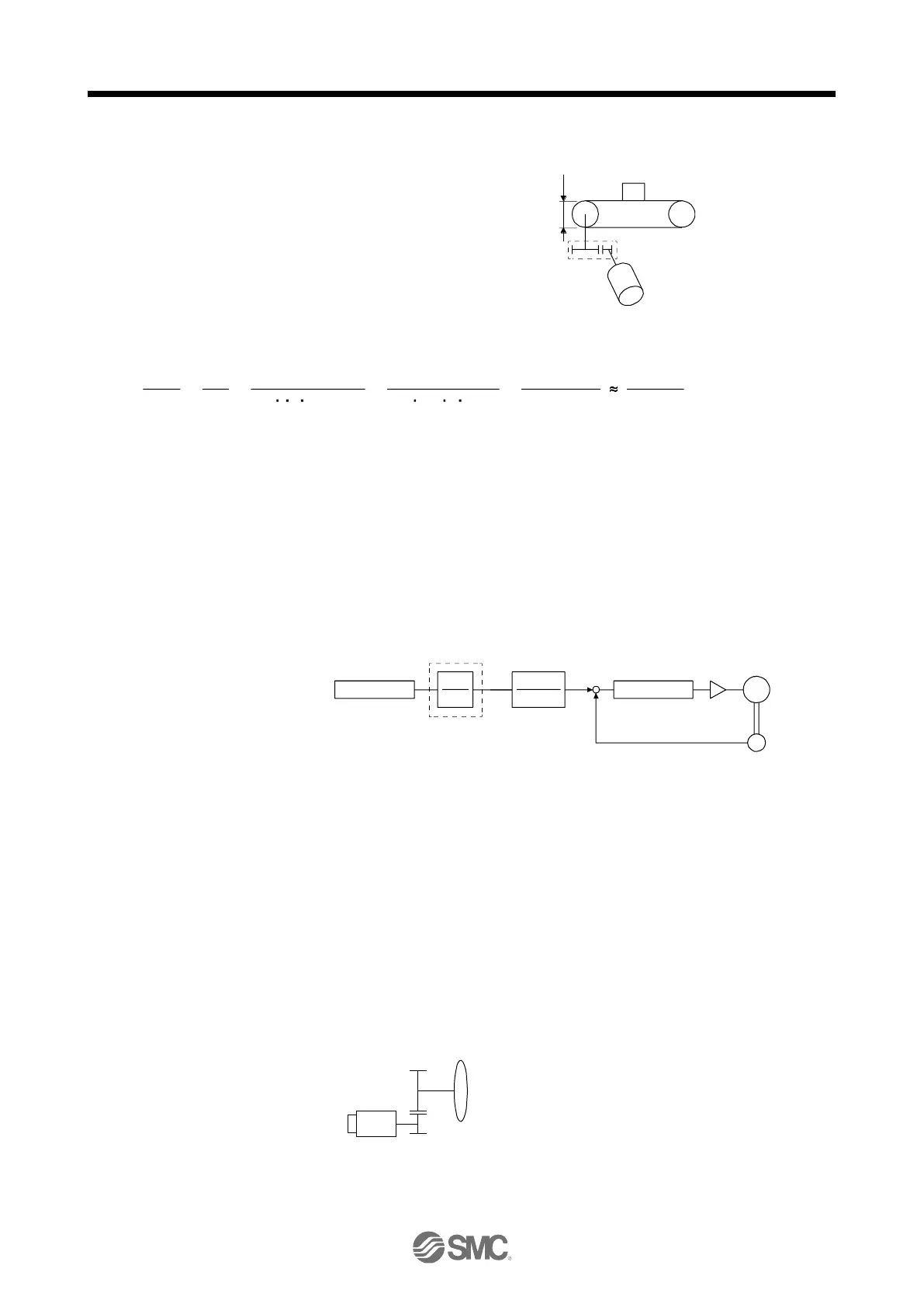
(b) Setting example of a conveyor
Machine specifications
Pulley diameter: r = 160 [mm]
Reduction ratio: 1/n = Z
1
/Z
2
= 1/3
Z
1
: Number of gear teeth on servo motor side
Z
2
: Number of gear teeth on load gear
Servo motor encoder resolution
4194304 [pulse/rev]
Z1Z2
1/n = Z1/Z2 = 1/3
1/n
r = 160 [mm]
Servo motor encoder resolution P
t
= 4194304 [pulse/rev]
CMX
CDV
P
t
=
ΔS
P
t
=
4194304
=
4194304
=
167551.61
524288
209441/n r πα (Note) 1/3 160 π 1000
Because the command unit is "mm", α is 1000. When the unit is "inch", α is 10000. When the unit is "pulse", α is 1.
Reduce CMX and CDV to within the setting range or lower and round off each value to the closest
whole number.
Therefore, set CMX = 524288 and CDV = 20944.
(2) Setting [degree] with "Position data unit" of [Pr. PT01].
Set the number of gear teeth on machine side to [Pr. PA06] and the number of gear teeth on servo motor
side to [Pr. PA07].
Travel distance
Deviation counter
+
-
Electronic gear
([Pr. PA06]/[Pr. PA07])
Servo motor
Encoder
M
P
t
: Servo motor encoder resolution: 4194304 [pulse/rev]
CDV
CMX
360000
P
t
Set the electronic gear within the following range. Setting out of the range will trigger [AL. 37 Parameter
error].
(a) Set values to make numerator and denominator 16384 or lower if the electronic gear (CMX/CDV) is
reduced to its lowest terms.
(b) Set values to make numerator and denominator 16777216 or lower if (CMX × P
t
)/(CDV × 360000) is
reduced to its lowest terms.
The following shows a setting example of the electronic gear.
Number of gear teeth on machine side: 25, number of gear teeth on servo motor side: 11
Set [Pr. PA06] = 25 and [Pr. PA07] = 11.
P
t
(Servo motor resolution): 4194304 pulses/rev
Z1: Number of gear teeth on servo motor side
Z2: Number of gear teeth on machine side
Z1: Z2 = 11:25
Servo motor
Machine
Z2
Z1

 Loading...
Loading...







