16. HOW TO USE THE POINT TABLE
2) Positioning in the reverse direction midway
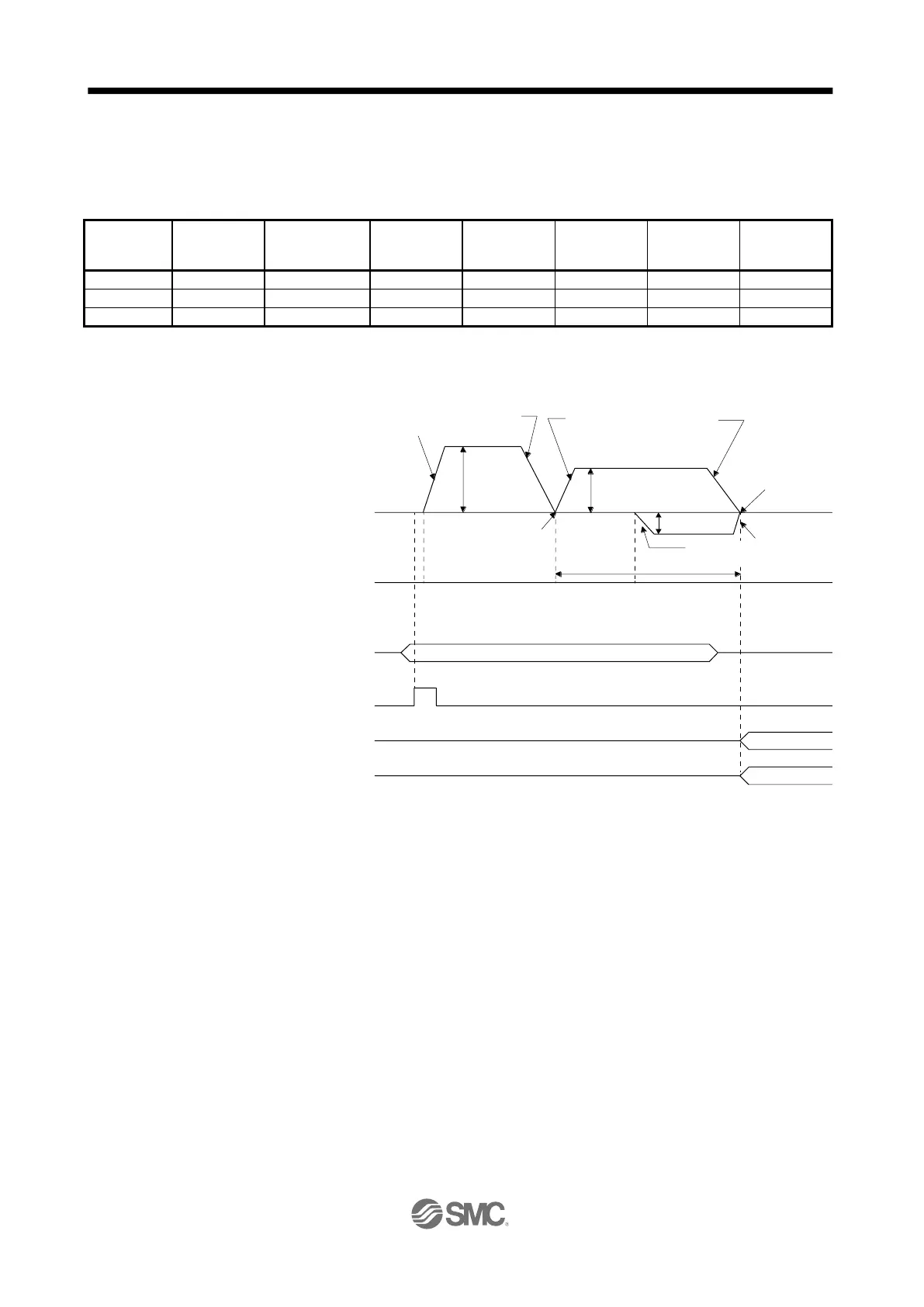
The following shows an operation example with the set values listed in the table below.
In this example, point table No. 1 and No. 3 are set to the absolute position command method,
and point table No. 2 is set to the relative position command method.
Servo motor
speed [r/min]
Acceleration
time constant
[ms]
Deceleration
time constant
[ms]
Be sure to set "0" or "2" to the auxiliary function of the last point table of the consecutive point tables.
0: When using the point table with the absolute position command method
2: When using the point table with the relative position command method
Dw ell time
100 ms
Speed
(3000.00)
Acceleration/deceleration time
constant of point table No. 2
Speed
(2000.00)
Acceleration/deceleration time
constant of point table No. 3
Dw ell time
200 ms
Position address
Reverse
rotation
0 r/min
Forward
rotation
Servo motor speed
Target point table
Controlw ord bit 4
(New set-point)
ON
OFF
Point actual value
M code actual value
Speed (1000.00)
7.00
0 5.00 8.00 12.00
1
1
05
Acceleration/deceleration time
constant of point table No. 1
 Loading...
Loading...








