(3) Operation
Turning on "Controlword bit 4 (Rotation start)" will start rotation to a direction specified with "Controlword
bit 5 (Direction)", and turning off "Controlword bit 4 (Rotation start)" will execute a positioning to the
closest station position which is possible to decelerate to a stop. However, the speed may not reach the
specified speed because the shaft stops with the set time constant, depending on the setting value of
deceleration time constant.
Rotation direction selection
Set the rotation direction in "Controlword bit 5
(Direction)". The setting is shown as follows:
Off: Station No. decreasing direction
On: Station No. increasing direction
Set start/stop in "Controlword bit 4 (Rotation
start)". The setting is shown as follows:
On: start
Off: stop at a station which is the closest and
possible to decelerate to a stop
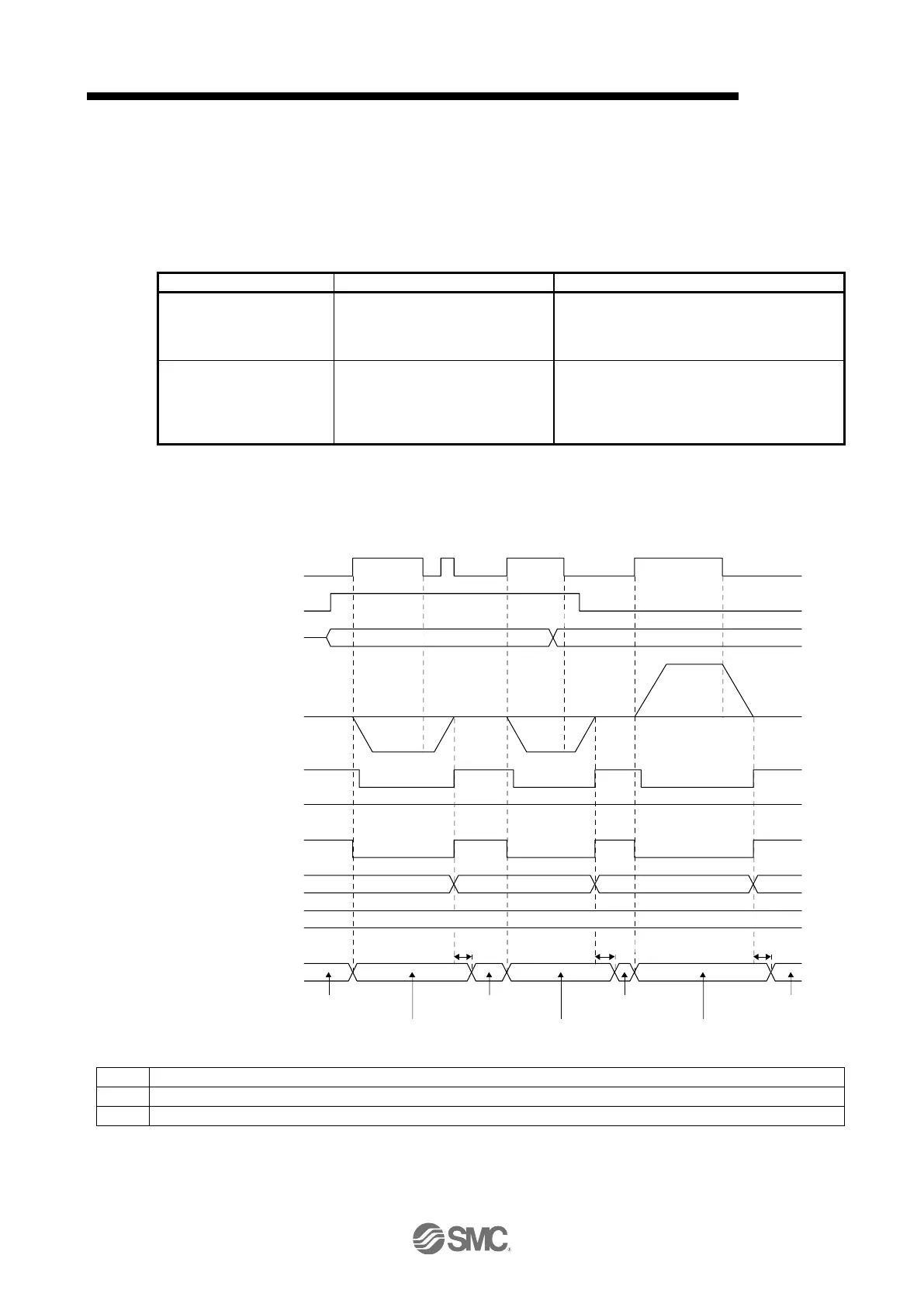
(4) Timing chart
The following timing chart shows that a JOG operation is performed at a stop of the station No. 0 when
servo-on.
Reverse
rotation
0 r/min
Forward
rotation
ON
OFF
ON
OFF
ON
OFF
INP/S_INP
(In-position)
Point actual value
Enabled torque limit value
Controlw ord bit 4
(Rotation start)
Controlw ord bit 5
(Direction)
Servo motor speed
Point demand value 1 2 3 5 6 7
7 2
6 50
0 4
4 3
(Note 1)
150.00 r/minProfile velocity
Status DO 5 bit 5
(S_CPO (Rough match))
Status DO 5 bit 6
(S_MEND (Travel completion))
ON
OFF
ON
OFF
(Note 3)
Torque limit value2
Positive torque limit value/
Negative torque limit value
Torque limit value2
Positive torque limit value/
Negative torque limit value
Torque limit value2
Positive torque limit value/
Negative torque limit value
Torque limit value2
(Note 3)
4 74 2
100.00 r/min
(Note 3)
(Note 2)
"Controlword bit 4 (Rotation start)" is not received when the rest of command travel distance is other than "0".
Switching "Profile velocity" during the servo motor rotation does not enable this.
A delay time can be set with [Pr. PT39].

 Loading...
Loading...







