18.EtherCAT COMMUNICATION
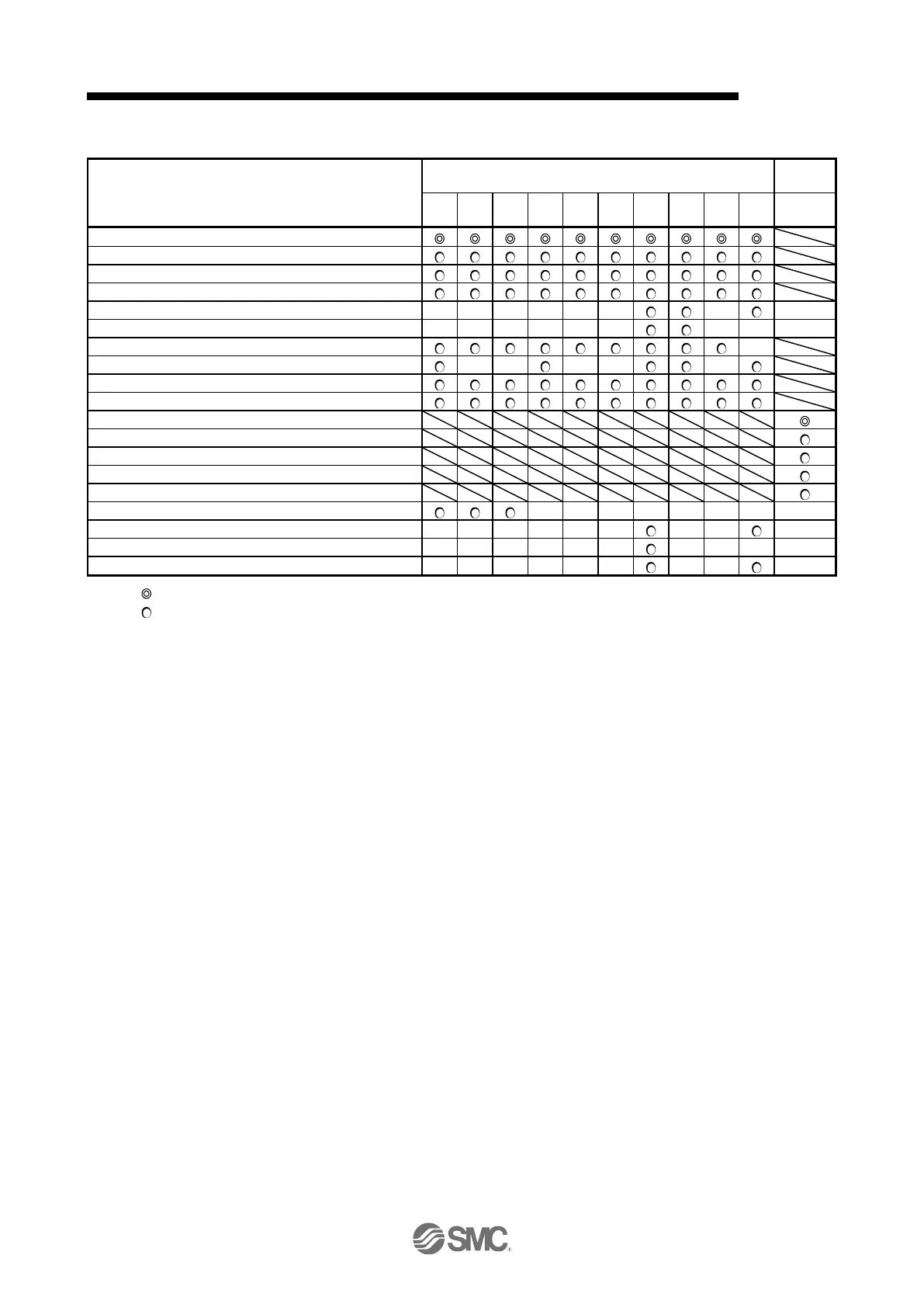
Position actual value (6064h)
Following error actual value (60F4h)
Velocity actual value (606Ch)
Torque actual value (6077h)
Touch probe status (60B9h)
Touch probe pos1 pos value (60BAh)
Touch probe pos1 neg value (60BBh)
Touch probe pos2 pos value (60BCh)
Touch probe pos2 neg value (60BDh)
Watch dog counter UL (2D24h)
Point actual value (2D69h)
M code actual value (2D6Ah)
Point demand value (2D68h)
: Mapping required
: Mapping recommended
-: Mapping not required

 Loading...
Loading...







