18.EtherCAT COMMUNICATION
(3) Details on the OMS bit of Statusword (jg mode)
0 (Halt (Bit 8) = 0): Target position not reached.
0 (Halt (Bit 8) = 1): Axis decelerates
1 (Halt (Bit 8) = 0): Target position reached.
1 (Halt (Bit 8) = 1): Velocity of axis is 0
Judgment condition for Target position reached
If the error between Position actual value (6064h) and Target position (607Ah) has stayed
within Position window (6067h) for Position window time (6068h) or more, Target position
reached is stored.
The value at reading is undefined.
0: No following error
1: Following error
Judgment condition for Following error
When the time set with Following error time out (6066h) has elapsed with the number of
droop pulses exceeding the set value of the Following error window (6065h), this bit
becomes "1".
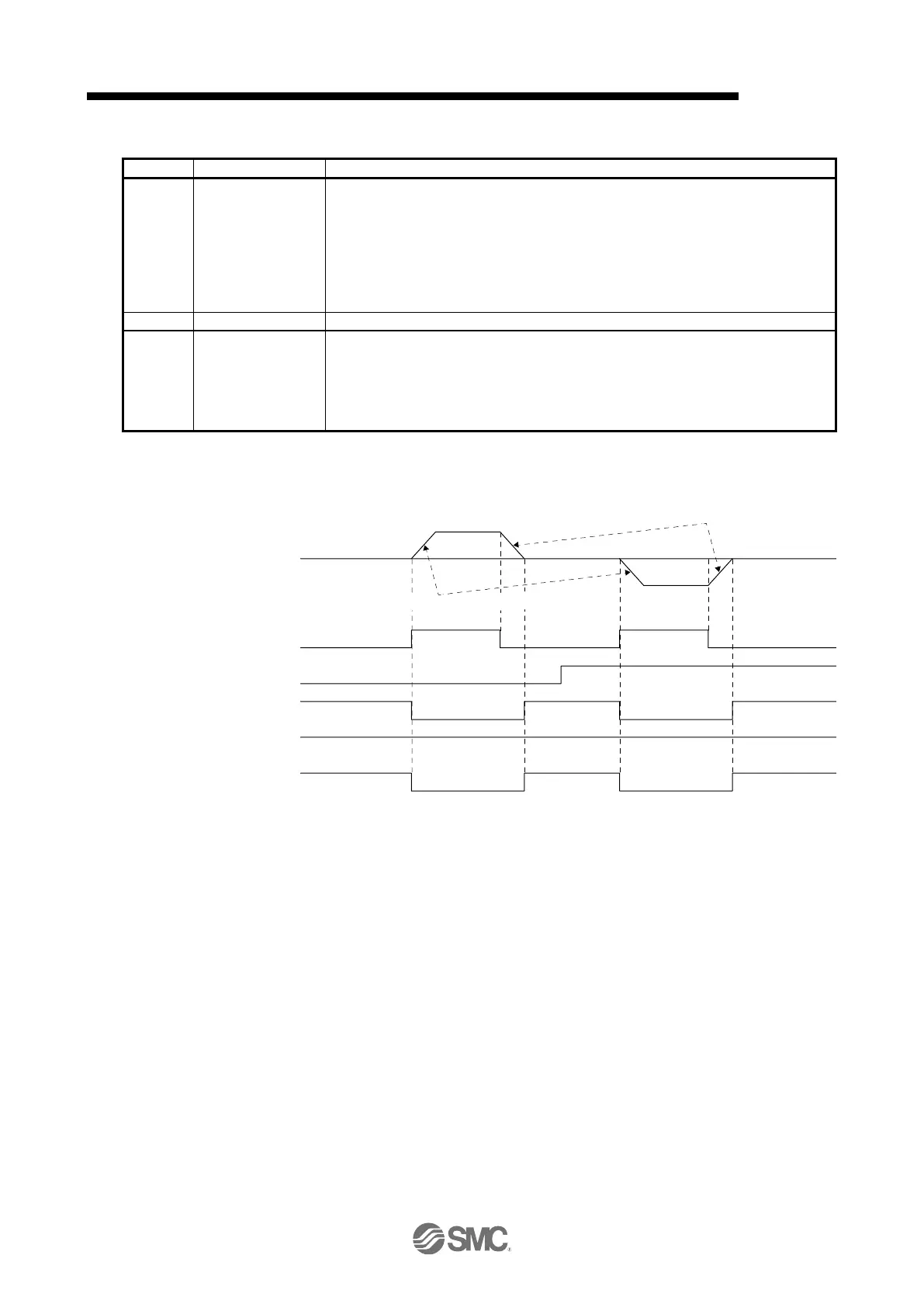
(4) jg mode operation sequence in the point table method
(a) When operating at a constant speed
Status DO 5 bit 6
(S_MEND (Travel completion))
Status DO 5 bit 5
(S_CPO (Rough match))
ON
OFF
Servo motor speed
ON
OFF
ON
OFF
ON
OFF
Controlword bit 4
(Rotation start)
Controlword bit 5
(Direction)
Statusw ord bit 10
(Target reached)
ON
OFF
Decelerates w ith Profile acceleration
Reverse
rotation
0 r/min
Forw ard
rotation
Accelerates w ith Profile acceleration

 Loading...
Loading...







