3. SIGNALS AND WIRING
3 - 18
When the speed reaches the speed limit value in the torque mode, VLC will turn on. When the
servo is off, TLC will be turned off.
The device cannot be used in the position mode and velocity mode.
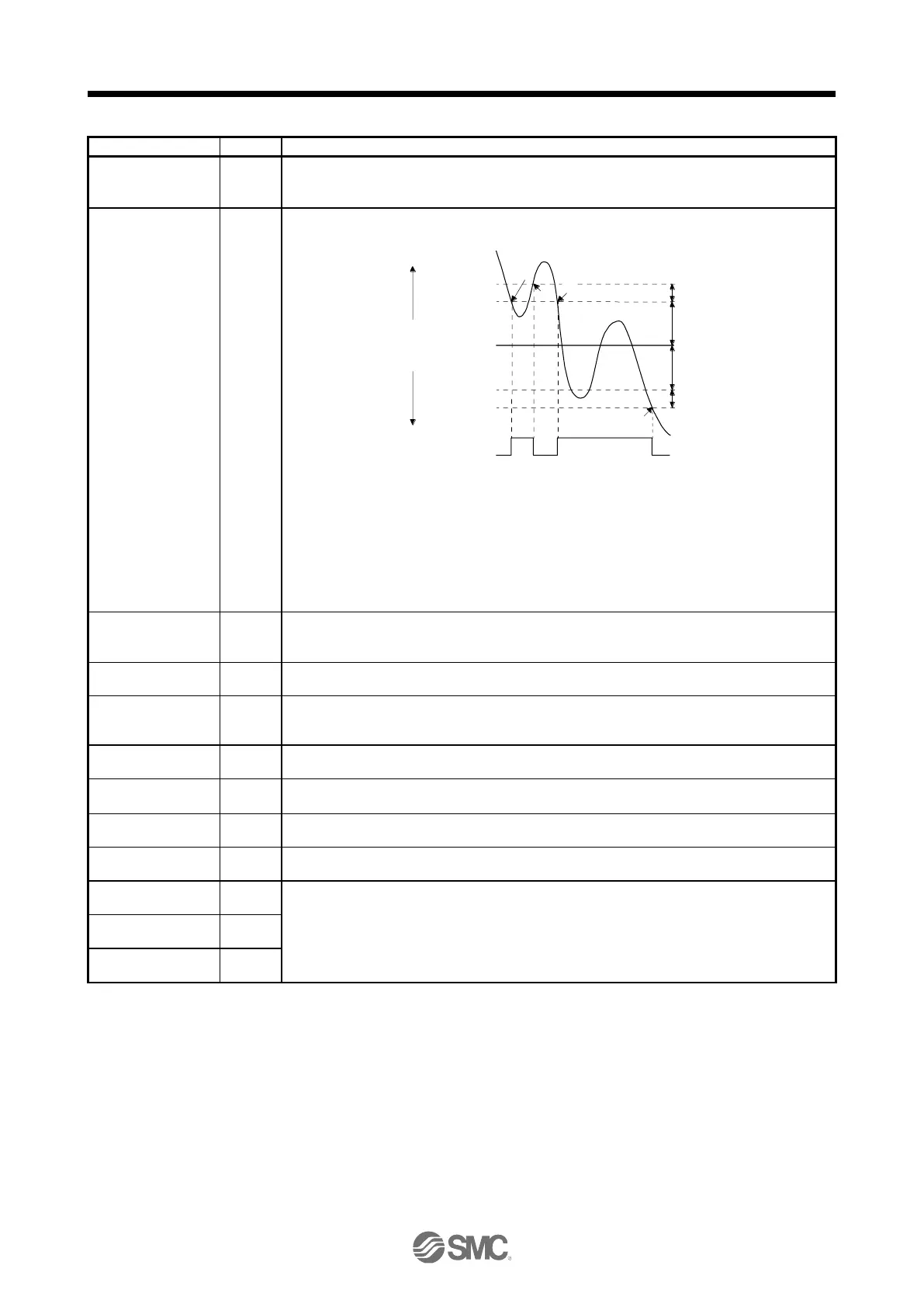
ZSP turns on when the servo motor speed is zero speed (50 r/min) or less. Zero speed can be
changed with [Pr. PC07].
OFF
ON
Servo motor
speed
20 r/min
(Hysteresis w idth)
[Pr. PC07]
20 r/min
(Hysteresis w idth)
OFF level
-70 r/min
ON level
-50 r/min
ON level
50 r/min
OFF level
70 r/min
0 r/min
[Pr. PC07]
ZSP
(Zero speed
detection)
1)
3)
2)
4)
Forward
rotation
direction
Reverse
rotation
direction
ZSP will turn on when the servo motor is decelerated to 50 r/min (at 1)), and will turn off when the
servo motor is accelerated to 70 r/min again (at 2)).
ZSP will turn on when the servo motor is decelerated again to 50 r/min (at 3)), and will turn off
when the servo motor speed has reached -70 r/min (at 4)).
The range from the point when the servo motor speed has reached on level, and ZSP turns on, to
the point when it is accelerated again and has reached off level is called hysteresis width.
Hysteresis width is 20 r/min for this driver.
When the torque reaches the torque limit value during torque generation, TLC will turn on. When
the servo is off, TLC will be turned off.
This device cannot be used in the torque mode.
When warning has occurred, WNG turns on. When a warning is not occurring, WNG will turn off in
2.5 s to 3.5 s after power-on.
BWNG turns on when [AL. 92 Battery cable disconnection warning] or [AL. 9F Battery warning]
has occurred. When the battery warning is not occurring, BWNG will turn off in 2.5 s to 3.5 s after
power-on.
CDPS will turn on during variable gain.
Absolute position
undetermined
ABSV turns on when the absolute position is undetermined.
The device cannot be used in the velocity mode and torque mode.
When a tough drive is enabled in [Pr. PA20], activating the instantaneous power failure tough
drive will turn on MTTR.
During fully closed
loop control
CLDS turns on during fully closed loop control.
The pins to which this device is assigned can be switched on/off with "Digital outputs" of the
object. For details, refer to chapter 18,19,20.

 Loading...
Loading...







