19.EtherNet/IP COMMUNICATION
(2) Target object
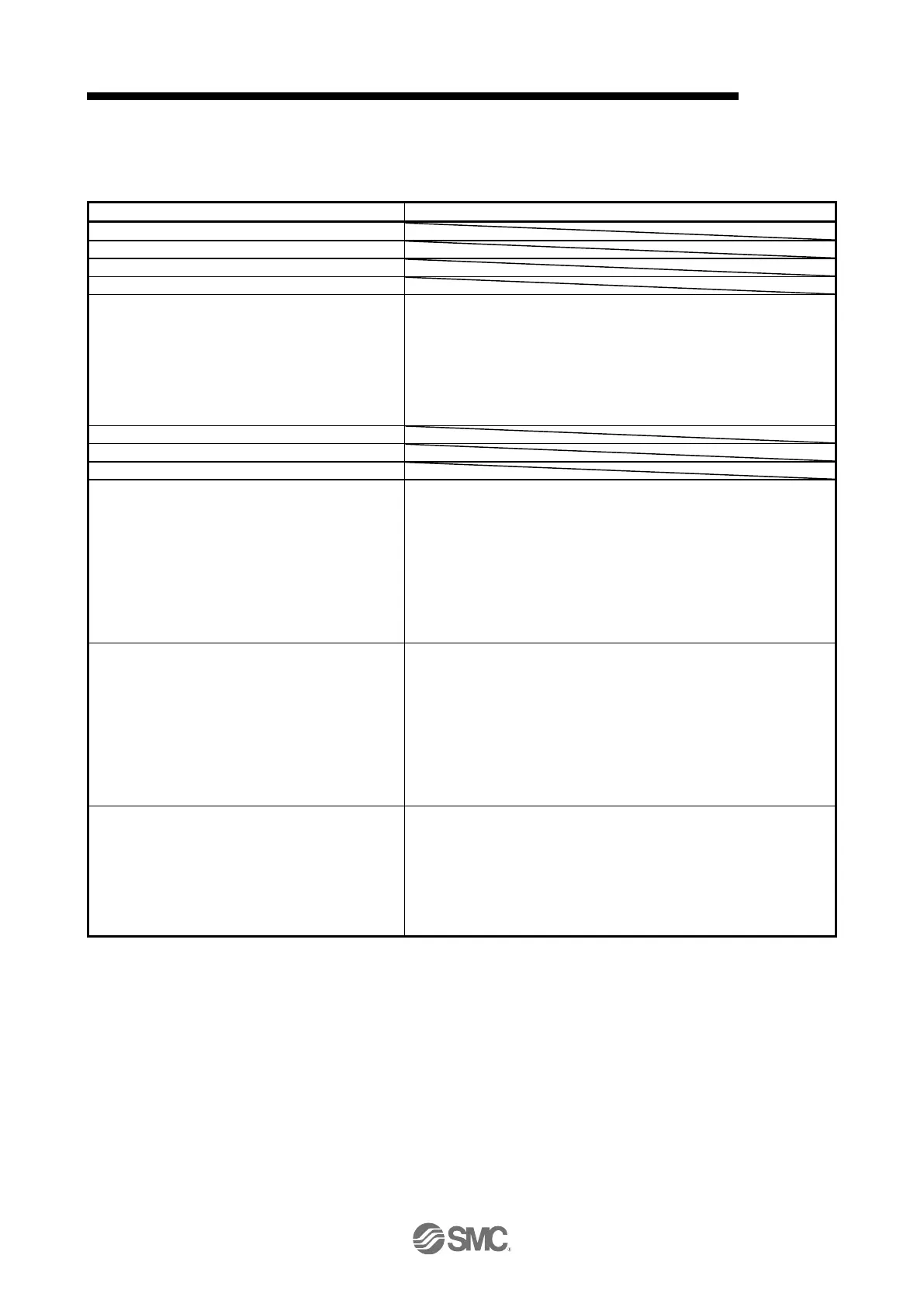
The following shows objects whose polarity is reversed according to the setting of Polarity (Class ID: 64h,
Ins ID: 607Eh, Attr ID: 0).
Object name (Class ID, Ins ID, Attr ID)
Target position (64h, 607Ah, 0)
Target velocity (64h, 60FFh, 0)
Target torque (64h, 6071h, 0)
Position actual value (64h, 6064h, 0)
Velocity demand value (64h, 606Bh, 0)
Whether to reverse the polarity using Polarity (607Eh) can be switched with
"Internal command speed POL reflection selection" of [Pr. PC76].
[Pr. PC76] = _ 0 _ _ (Automatic setting): Automatically set depending on the
type of the network in use.
[Pr. PC76] = _ 1 _ _ (POL setting enabled): The polarity is reversed using
Polarity.
[Pr. PC76] = _ 2 _ _ (POL setting disabled): The polarity is not reversed
using Polarity.
Velocity actual value (64h, 606Ch, 0)
Torque demand (64h, 6074h, 0)
Torque actual value (64h, 6077h, 0)
Positive torque limit value (64h, 60E0h, 0)
The corresponding parameters are changed according to "POL reflection
selection at torque mode" in [Pr. PA14] and [Pr. PC29] as follows.
[Pr. PA14] = 0, [Pr. PC29] = 1 _ _ _ (Disabled): Written to [Pr. PA11
Forward rotation torque limit/positive direction limit].
[Pr. PA14] = 1, [Pr. PC29] = 1 _ _ _ (Disabled): Written to [Pr. PA11
Forward rotation torque limit/positive direction limit].
[Pr. PA14] = 0, [Pr. PC29] = 0 _ _ _ (Enabled): Written to [Pr. PA11 Forward
rotation torque limit/positive direction limit].
[Pr. PA14] = 1, [Pr. PC29] = 0 _ _ _ (Enabled): Written to [Pr. PA12
Reverse rotation torque limit/negative direction limit].
Negative torque limit value (64h, 60E1h, 0)
The corresponding parameters are changed according to "POL reflection
selection at torque mode" in [Pr. PA14] and [Pr. PC29] as follows.
[Pr. PA14] = 0, [Pr. PC29] = 1 _ _ _ (Disabled): Written to [Pr. PA12
Reverse rotation torque limit/negative direction limit].
[Pr. PA14] = 1, [Pr. PC29] = 1 _ _ _ (Disabled): Written to [Pr. PA12
Reverse rotation torque limit/negative direction limit].
[Pr. PA14] = 0, [Pr. PC29] = 0 _ _ _ (Enabled): Written to [Pr. PA12
Reverse rotation torque limit/negative direction limit].
[Pr. PA14] = 1, [Pr. PC29] = 0 _ _ _ (Enabled): Written to [Pr. PA11 Forward
rotation torque limit/positive direction limit].
Digital inputs (64h, 60FDh, 0)
The corresponding status is changed according to the setting of [Pr. PA14]
as follows.
[Pr. PA14] = 0: The status of LSN (reverse rotation stroke end) is applied to
Negative limit switch (bit 0). The status of LSP (forward rotation stroke end)
is applied to Positive limit switch (bit 1).
[Pr. PA14] = 1: The status of LSP (forward rotation stroke end) is applied to
Negative limit switch (bit 0). The status of LSN (reverse rotation stroke end)
is applied to Positive limit switch (bit 1).

 Loading...
Loading...







