PC24
RSBR
Forced stop
deceleration
time constant
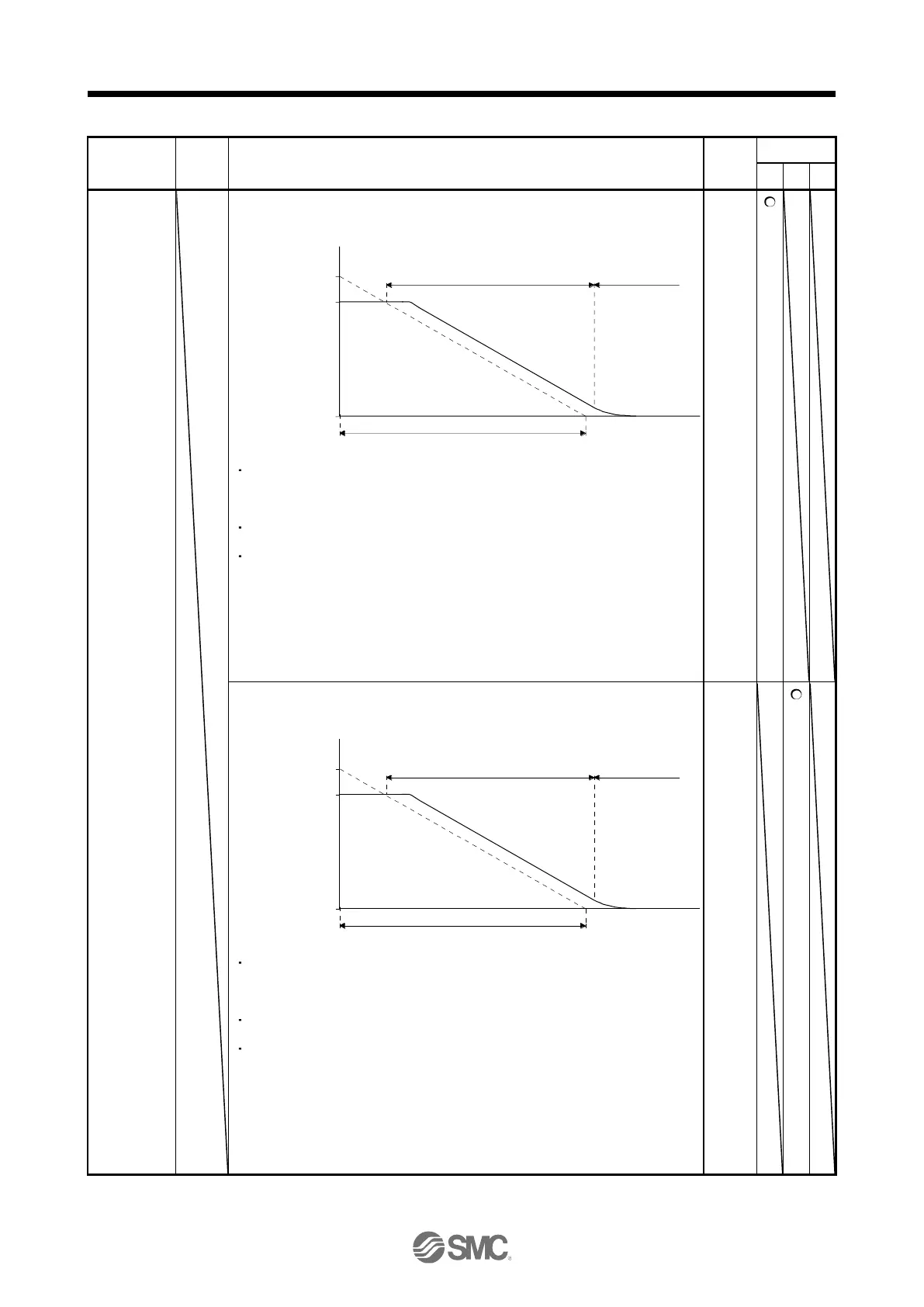
Set a deceleration time constant for the forced stop deceleration function.
Set the time taken from the rated speed to 0 r/min or 0 mm/s in units of ms. Setting
"0" will apply 100 ms.
Forced stop deceleration
[Pr. PC24]
0 r/min
(0 mm/s)
Servo motor speed
Rated speed
Dynamic brake
deceleration
[Precautions]
If the servo motor torque or linear servo mot is saturated at the
maximum value during forced stop deceleration because the
set time is too short, the time to stop the servo motor will be
longer than the set time constant.
[AL. 50 Overload 1] or [AL. 51 Overload 2] may occur during
forced stop deceleration, depending on the set value.
After an alarm that leads to a forced stop deceleration, if an
alarm that does not lead to a forced stop deceleration occurs
or if the control circuit power supply is cut, dynamic braking will
start regardless of the deceleration time constant setting.
This parameter corresponds to "Quick stop deceleration (Index: 6085h)". When this
parameter is mapped for the PDO communication, the value written with Setup
software (MR Configurator2
TM
) is overwritten with the upper side. Thus, do not write
a value with Setup software (MR Configurator2
TM
).
Setting range: 0 to 20000
Set a deceleration time constant for the forced stop deceleration function.
Set the time taken from the rated speed to 0 r/min or 0 mm/s in units of ms. Setting
"0" will apply 100 ms.
Forced stop deceleration
[Pr. PC24]
0 r/min
(0 mm/s)
Servo motor speed
Rated speed
Dynamic brake
deceleration
[Precautions]
If the servo motor torque or linear servo mot is saturated at the
maximum value during forced stop deceleration because the
set time is too short, the time to stop the servo motor will be
longer than the set time constant.
[AL. 50 Overload 1] or [AL. 51 Overload 2] may occur during
forced stop deceleration, depending on the set value.
After an alarm that leads to a forced stop deceleration, if an
alarm that does not lead to a forced stop deceleration occurs
or if the control circuit power supply is cut, dynamic braking will
start regardless of the deceleration time constant setting.
This parameter corresponds to "Quick stop deceleration (Class ID: 64h, Ins ID:
6085h, Attr ID: 0)". When this parameter is mapped for the I/O communication, the
value written with Setup software (MR Configurator2
TM
) is overwritten with the upper
side. Thus, do not write a value with Setup software (MR Configurator2
TM
).
Setting range: 0 to 20000
 Loading...
Loading...








