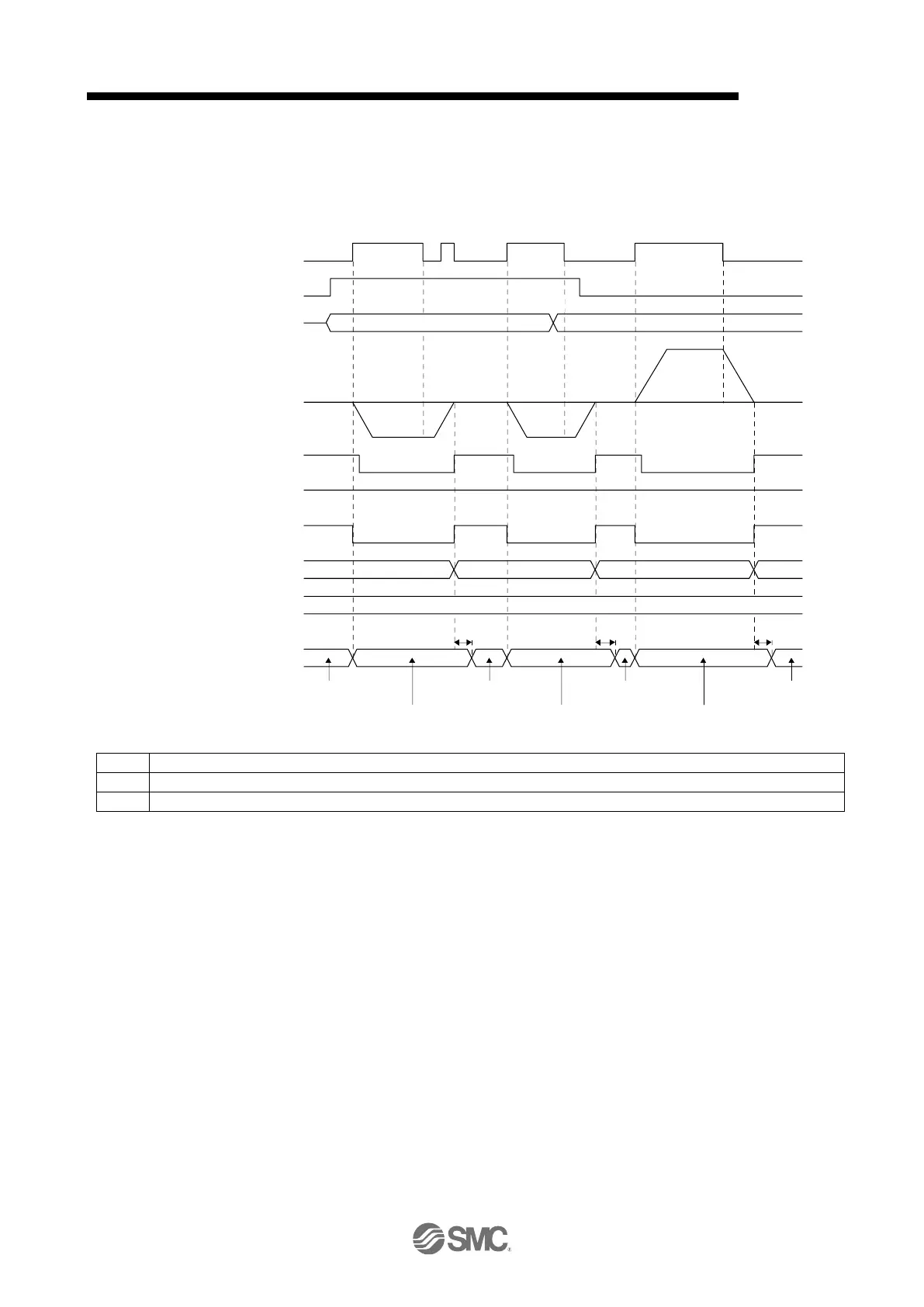
(5) jg mode operation sequence in the indexer method
(a) Station JOG operation
The following timing chart shows that a station JOG operation is performed at a stop of the station
No. 0 when servo-on.
Reverse
rotation
0 r/min
Forward
rotation
ON
OFF
ON
OFF
ON
OFF
INP/S_INP
(In-position)
Point actual value
Enabled torque limit value
Controlw ord bit 4
(Rotation start)
Controlw ord bit 5
(Direction)
Servo motor speed
Point demand value 1 2 3 5 6 7
7 2
6 50
0 4
4 3
(Note 1)
150.00 r/minProfile velocity
Status DO 5 bit 5
(S_CPO (Rough match))
Status DO 5 bit 6
(S_MEND (Travel completion))
ON
OFF
ON
OFF
(Note 3)
Torque limit value2
Positive torque limit value/
Negative torque limit value
Torque limit value2
Positive torque limit value/
Negative torque limit value
Torque limit value2
Positive torque limit value/
Negative torque limit value
Torque limit value2
(Note 3)
4 74 2
100.00 r/min
(Note 3)
(Note 2)

 Loading...
Loading...







