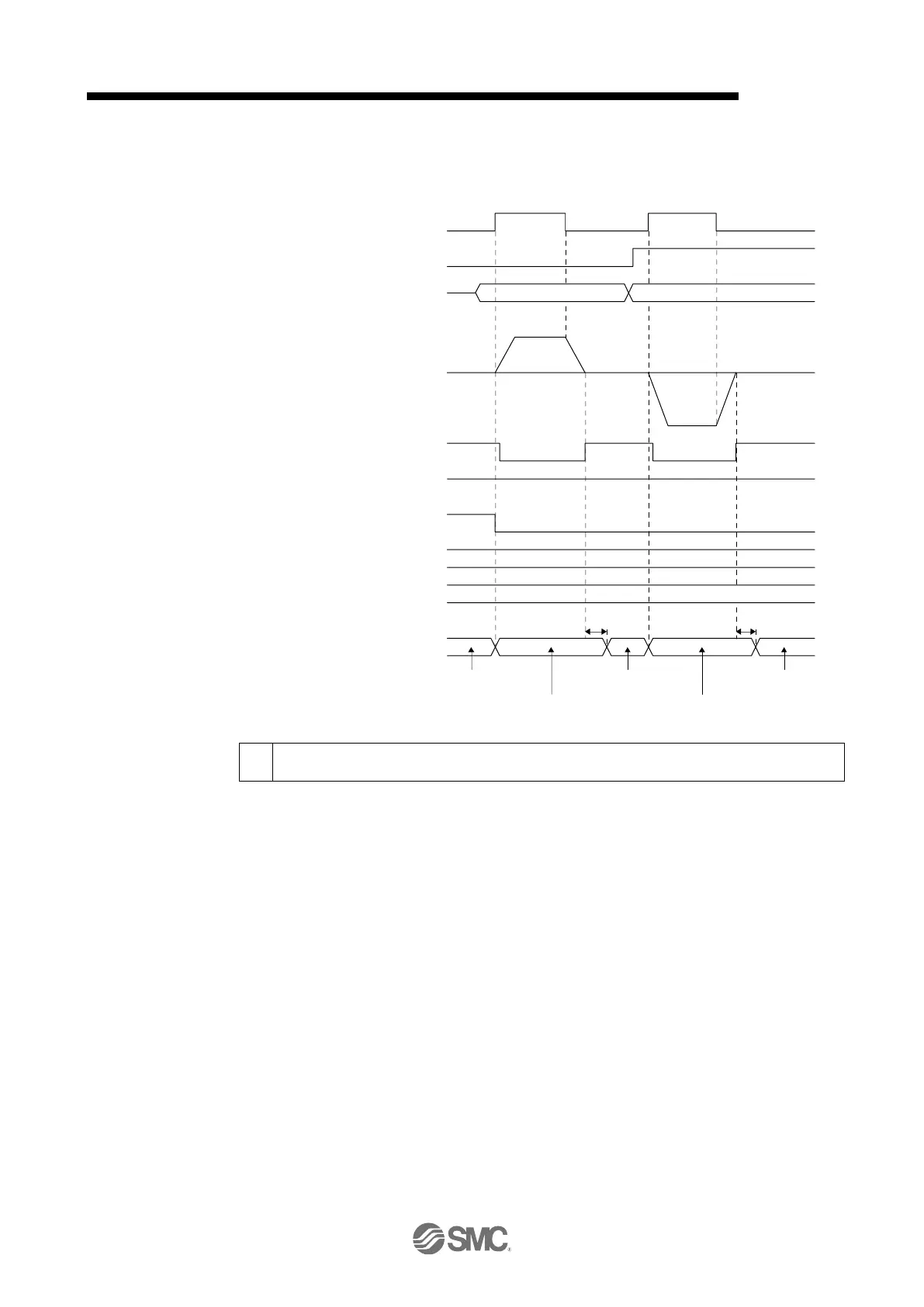
Reverse
rotation
0 r/min
Forw ard
rotation
ON
OFF
ON
OFF
ON
OFF
INP/S_INP
(In-position)
Point actual value
Enabled torque limit value
Controlw ord bit 4
(Rotation start)
Controlw ord bit 5
(Direction)
Servo motor speed
Point demand value 11 2 3 550
0
3
Profile velocity
Status DO 5 bit 5
(S_CPO (Rough match))
Status DO 5 bit 6
(S_MEND (Travel completion))
ON
OFF
ON
OFF
(Note)
Torque limit value2
Positive torque limit value/
Negative torque limit value
Torque limit value2
Positive torque limit value/
Negative torque limit value
Torque limit value2
(Note)
44 2
100.00 r/min
0
150.00 r/min

 Loading...
Loading...







