18.EtherCAT COMMUNICATION
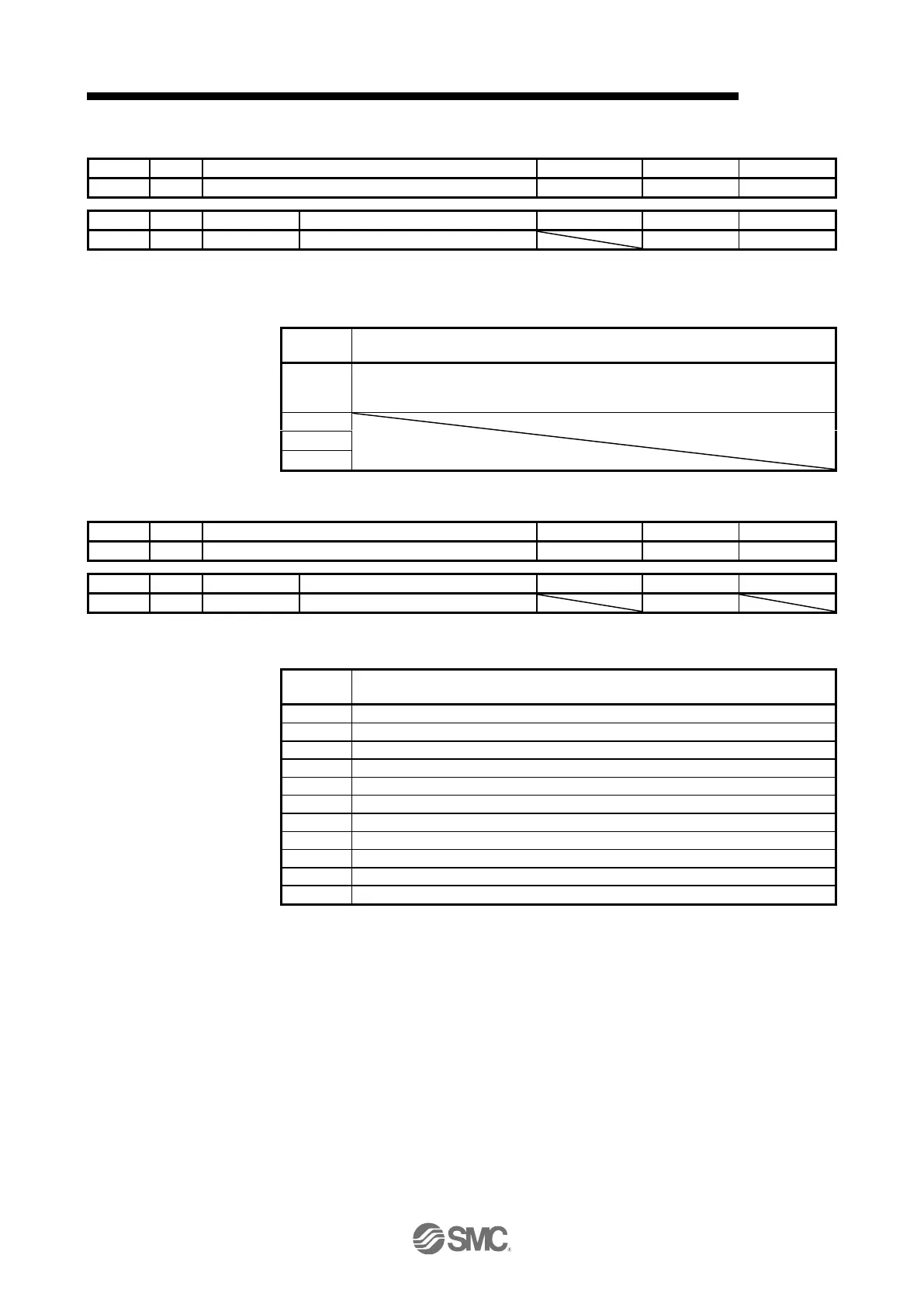
(5) Halt option code (605Dh)
Set how to decelerate the servo motor to a stop at Halt reception. The description of the setting values is
as follows.
For Profile deceleration (6084h) and the homing mode (hm), the servo motor
decelerates to a stop according to Homing acceleration (609Ah) and the state does
not change from the Operation Enabled state (servo-on).
(6) Modes of operation (6060h)
Set the control mode. The setting values are as follows.
No mode change/No mode assigned
Profile position mode (pp)
Profile velocity mode (pv)
Cyclic synchronous position mode (csp)
Cyclic synchronous velocity mode (csv)
Cyclic synchronous torque mode (cst)
The settable values are limited depending on the setting of [Pr. PA01]. Refer to section 5.4.1 for details.

 Loading...
Loading...







