19.EtherNet/IP COMMUNICATION
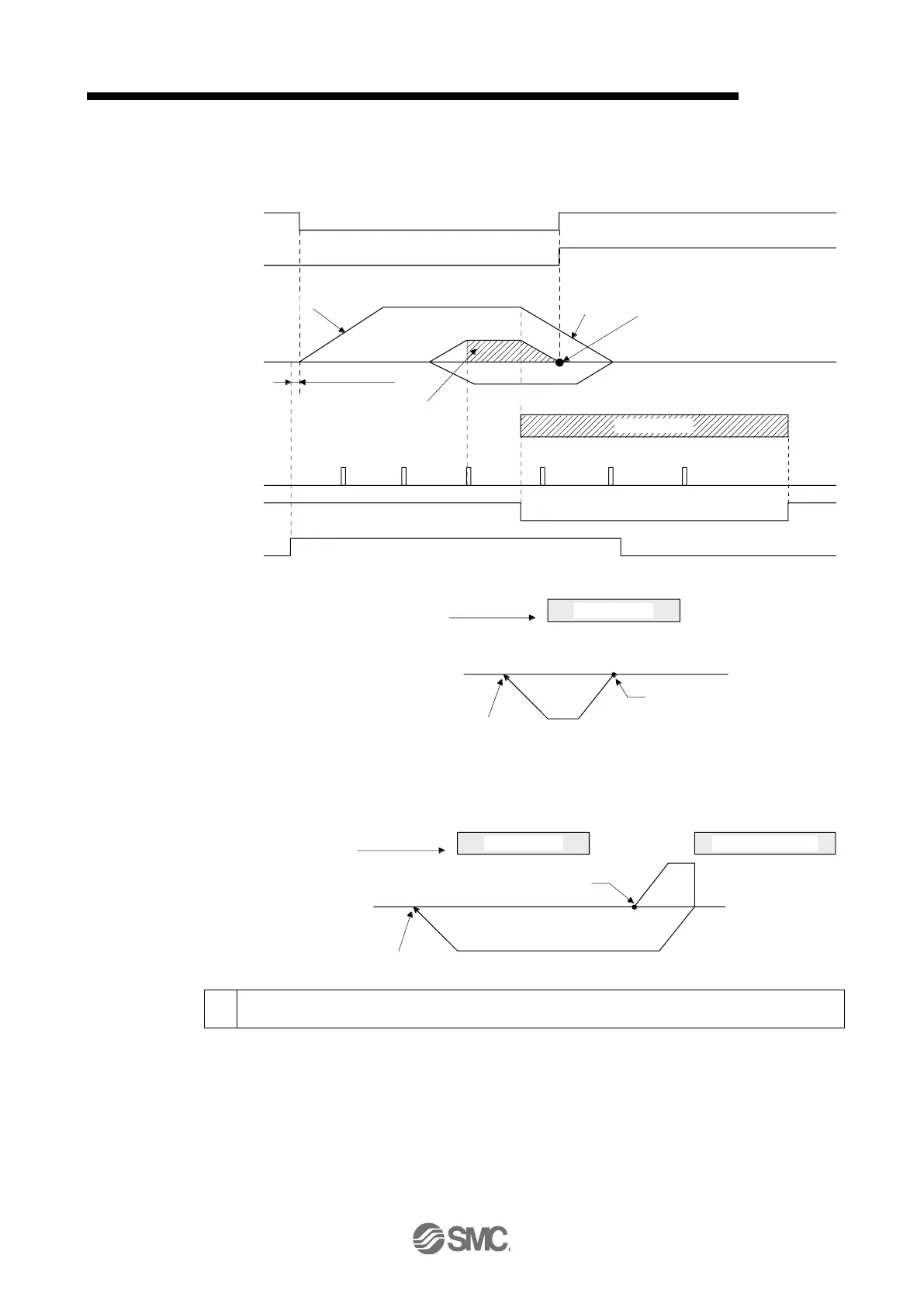
3) Method 7 and Method 11 (Homing on home switch and index pulse)
The following figure shows the operation of Homing method 7. The operation direction of Homing
method 11 is opposite to that of Homing method 7.
Servo motor speed
Reverse
rotation
0 r/min
Forward
rotation
Statusw ord bit 10
Target reached
ON
OFF
ON
OFF
Statusw ord bit 12
Homing attained
ON
OFF
ON
OFF
Controlw ord bit 4
Homing operation start
3 ms or shorter
Home position return speed
Deceleration time constant
Home position shift distance
Home position return position data
ON
OFF
Proximity dog
Creep speed
Z-phase
DOG (Proximity dog)
Acceleration time
constant
Servo motor speed
Reverse
rotation
0 r/min
Home position
return direction
Home position return start position
After retracting to before proximity dog,
the home position return starts from here.
Proximity dog
When a home position return is started from the proximity dog
Servo motor speed
Reverse
rotation
0 r/min
Forward
rotation
The home position return starts from here.
Home position
return direction
Home position return start position
Proximity dog
Stroke end (Note)
The software limit cannot be used with these functions.
When the movement is returned at the stroke end
 Loading...
Loading...








