PD11
*DIF
Input filter
setting
Select a filter for the input signal.
Input signal filter selection
If external input signal causes chattering due to noise, etc., input filter is used to
suppress it.
0: None
1: 0.888 [ms]
2: 1.777 [ms]
3: 2.666 [ms]
4: 3.555 [ms]
PD12
*DOP1
Function
selection D-1
Servo motor thermistor enabled/disabled selection
0: Enabled
1: Disabled
The setting in this digit will be disabled when you use a servo motor without
thermistor.
PD13
*DOP2
Function
selection D-2
INP (In-position) on condition selection
Select a condition for turning on INP (In-position).
0: Within the in-position range
1: Within the in-position range and at the completion of command output
PD14
*DOP3
Function
selection D-3
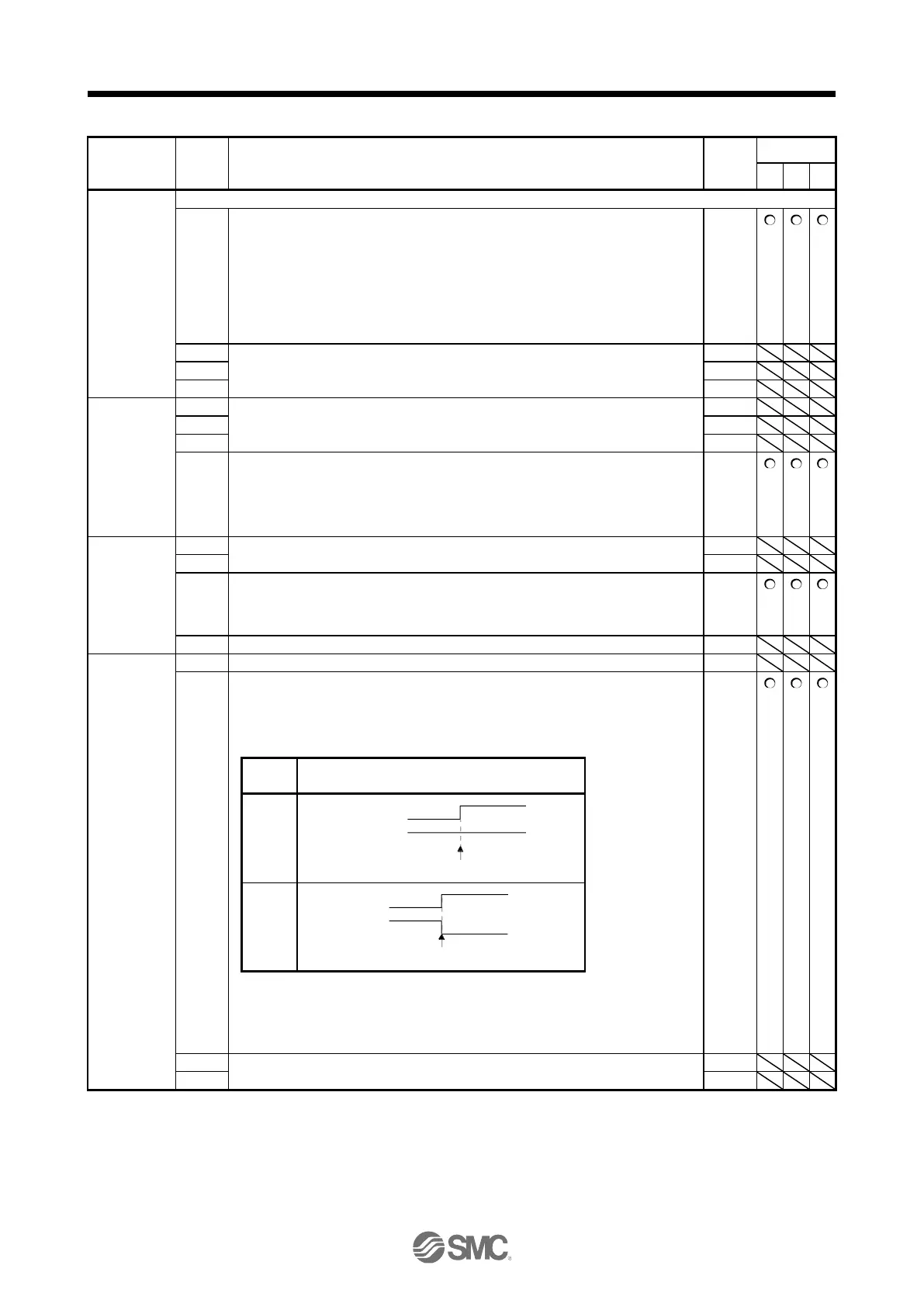
Selection of output device at warning occurrence
Select WNG (Warning) and ALM (Malfunction) output status at warning occurrence.
Driver output
0
1
0
1
WNG
ALM
Warning occurrence
0
1
0
1
WNG
ALM
Warning occurrence (Note 2)
Although ALM is turned off upon occurrence of the warning, the forced
stop deceleration is performed.

 Loading...
Loading...







