Details
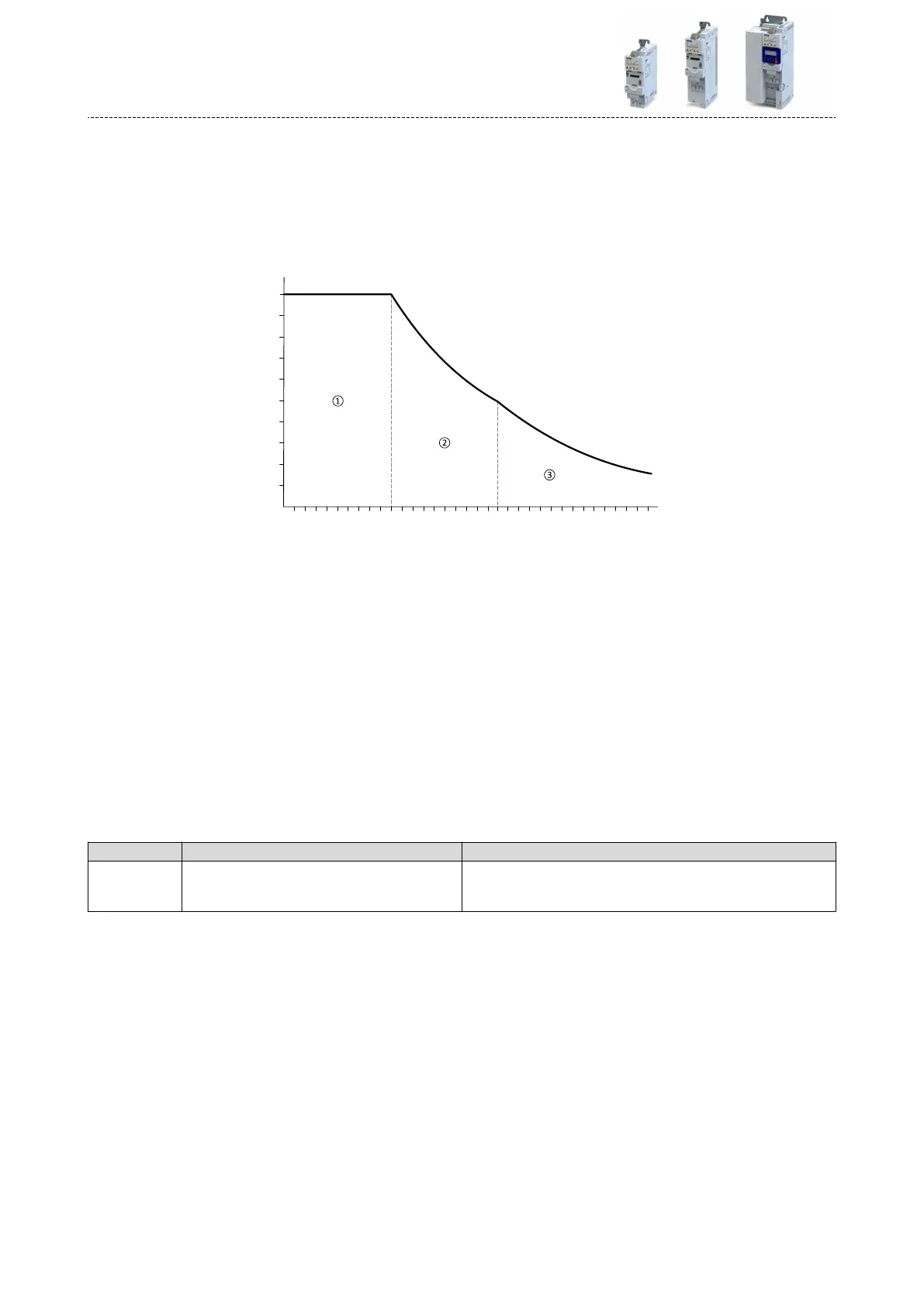
The operang range of an asynchronous motor consists of the voltage range
①
and the eld
weakening range. The eld weakening range is divided into two ranges:
•
In the rst range
②
, the power can be kept constant without the motor stalling.
•
The second eld weakening range
③
is characterised by the fact that the maximum per-
missible stator current is decreased to prevent the motor from stalling .
Speed/torque curve of the asynchronous motor with two eld weakening ranges
0
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3.0
3.1
3.2
3.3
3.4
n
1
M = M
2 *
n ²/n²
2
M
2
n
2
M = M
max
M = M
max *
n
1
/n
The override point (n
2
, M
2
) can be inuenced with 0x2B0C (P319.00).
0x2B0C (P319.00) > 0 Hz:
•
The maximum current characterisc is shied to higher eld frequencies by the frequency
entered.
•
The maximum permissible current and the maximum torque increase in the eld weaken-
ing range.
•
The risk of motor stalling increases.
0x2B0C (P319.00) < 0 Hz:
•
The maximum current characterisc is shied to lower eld frequencies by the frequency
entered.
•
The maximum permissible current and the maximum torque are reduced in the eld weak-
ening range.
•
The risk of motor stalling is reduced.
Parameter
Address Name / seng range / [default seng] Info
0x2B0C
(P319.00)
Override eld weakening
(Field weak thold)
-599.0 ... [0.0] ... 599.0 Hz
Oset of the override point for eld weakening.
Conguring the motor control
V/f characterisc control for asynchronous motor (VFC open loop)
Opmising the stalling behaviour
186

 Loading...
Loading...






