10.8.6 Motor torque monitoring
This funcon limits the motor torque during operaon.
Precondions
The motor torque monitoring can only be used for the following motor control types with
speed controller:
•
Servo control (SC ASM)
•
Sensorless control (SL PSM)
•
Sensorless vector control (SLVC)
Details
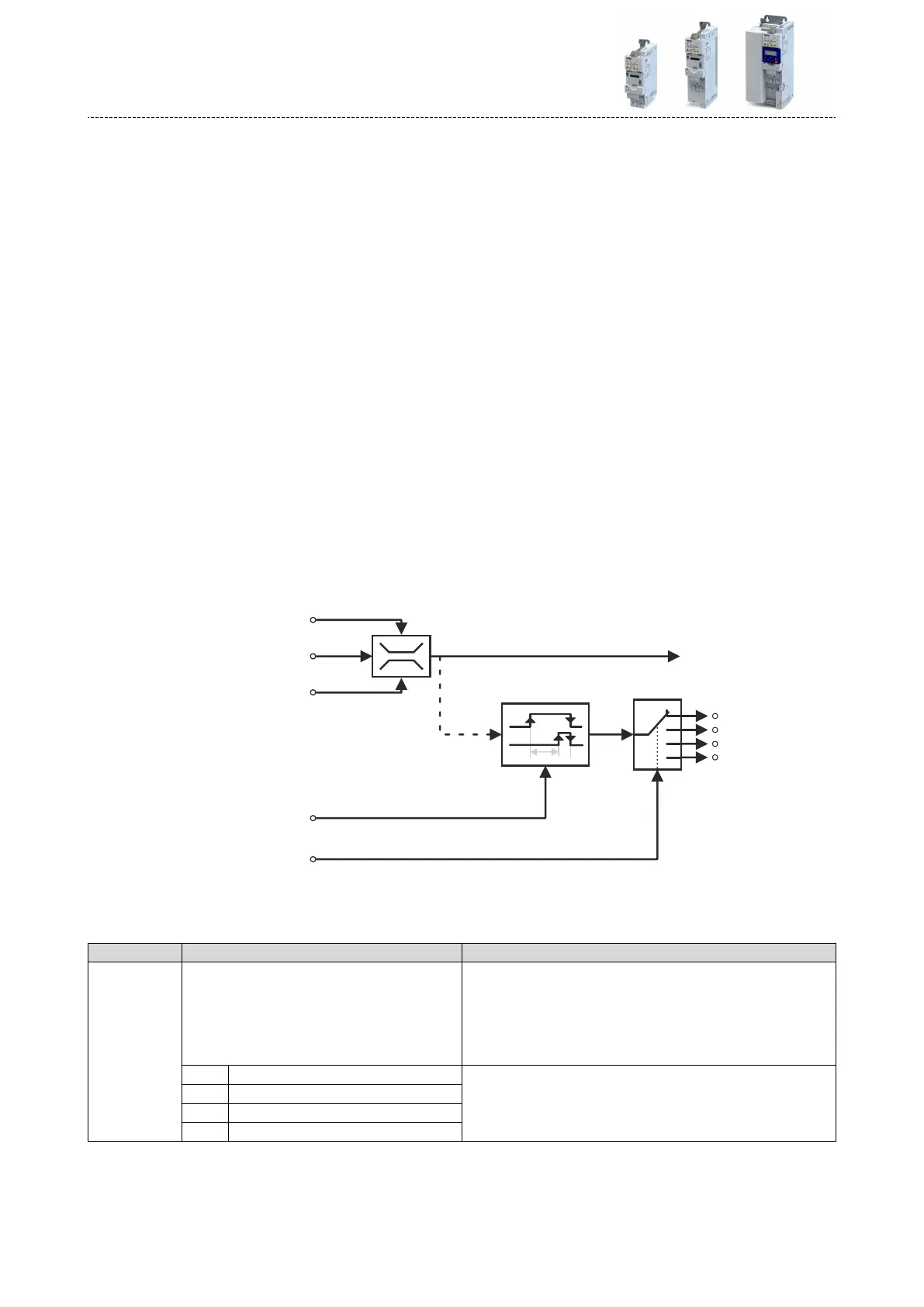
This funcon sets the internal status signal "Torque limit reached [79]" = TRUE when the maxi-
mum possible torque has been reached.
The limits of the monitoring funcon are selected via 0x2949:001 (P337.01) (posive torque
limit) and 0x2949:002 (P337.02) (negave torque limit). The actual limits can be seen in
0x2949:003 (P337.03) (actual posive torque limit), 0x2949:004 (P337.04) (actual negave
torque limit).
4Torque limits ^ 153
•
The status signal is set irrespecve of the response 0x2D67:001 (P329.01) and the delay
me 0x2D67:002 (P329.02) set for this monitoring.
•
The status signal can be used by the user to
•
acvate certain funcons. 4Flexible I/O conguraon ^ 56
•
set a digital output. 4
Congure digital outputs ^ 263
•
set a bit of the NetWordOUT1 mappable data word. 4Motor speed monitoring ^ 237
1
2
3
4
In
Out
timer
Keine Reaktion
Warnung
Störung
Fehler
Aktuelle positive Drehmomentgrenze
0x2949:003
Aktuelle negative Drehmomentgrenze
0x2949:004
Verschlussverzögerung
0x2067:002
Reaktion
0x2067:001
0x2831 Bit3
Parameter
Address Name / seng range / [default seng] Info
0x2D67:001
(P329.01)
Maximum torque monitoring: Response
(MaxTrq.Monitor: Response)
•
From version 02.00
Selecon of response to reaching the maximum possible torque.
•
The selected response takes place if the status signal "Torque limit
reached [79]" = TRUE and the deceleraon me set in 0x2D67:002
(P329.02) has elapsed.
Associated error code:
•
33553 | 0x8311 - Torque limit reached
0 No response
4Error types ^ 611
1 Warning
2 Trouble
3 Fault
Conguring the motor control
Motor protecon
Motor torque monitoring
238

 Loading...
Loading...






