Torque setpoint:
•
Set minimum desired torque setpoint (% torque). 0x2640:007 (P415.07)
•
Set maximum desired torque setpoint (% torque). 0x2640:008 (P415.08)
Filter
Filter me constant: in normal operaon, the standard value is sucient for execung this
funcon. 0x2640:009 (P415.09)
Monitoring
It is also possible for the inverter to monitor the frequency input and generate a response
when the frequency input falls below a predetermined frequency value and / or rises above a
predetermined frequency value.
Conguraon of inverter monitoring:
•
Set minimum frequency threshold to the lowest valid input frequency (in Hz). 0x2641:001
(P416.01)
•
Set maximum frequency threshold to the highest valid input frequency (in Hz).
0x2641:003 (P416.03)
•
Set minimum deceleraon threshold to the me period for which the input frequency
needs to fall below the minimum threshold in order to cause an error status. 0x2641:002
(P416.02)
•
Set maximum deceleraon threshold to the me period for which the input frequency
needs to exceed the maximum threshold in order to cause an error status. 0x2641:004
(P416.04)
•
Set monitoring condions 0x2641:005 (P416.05)
•
Set the error response to the desired acon that occurs when the error "Frequency input
monitoring error" is triggered. 0x2641:006 (P416.06)
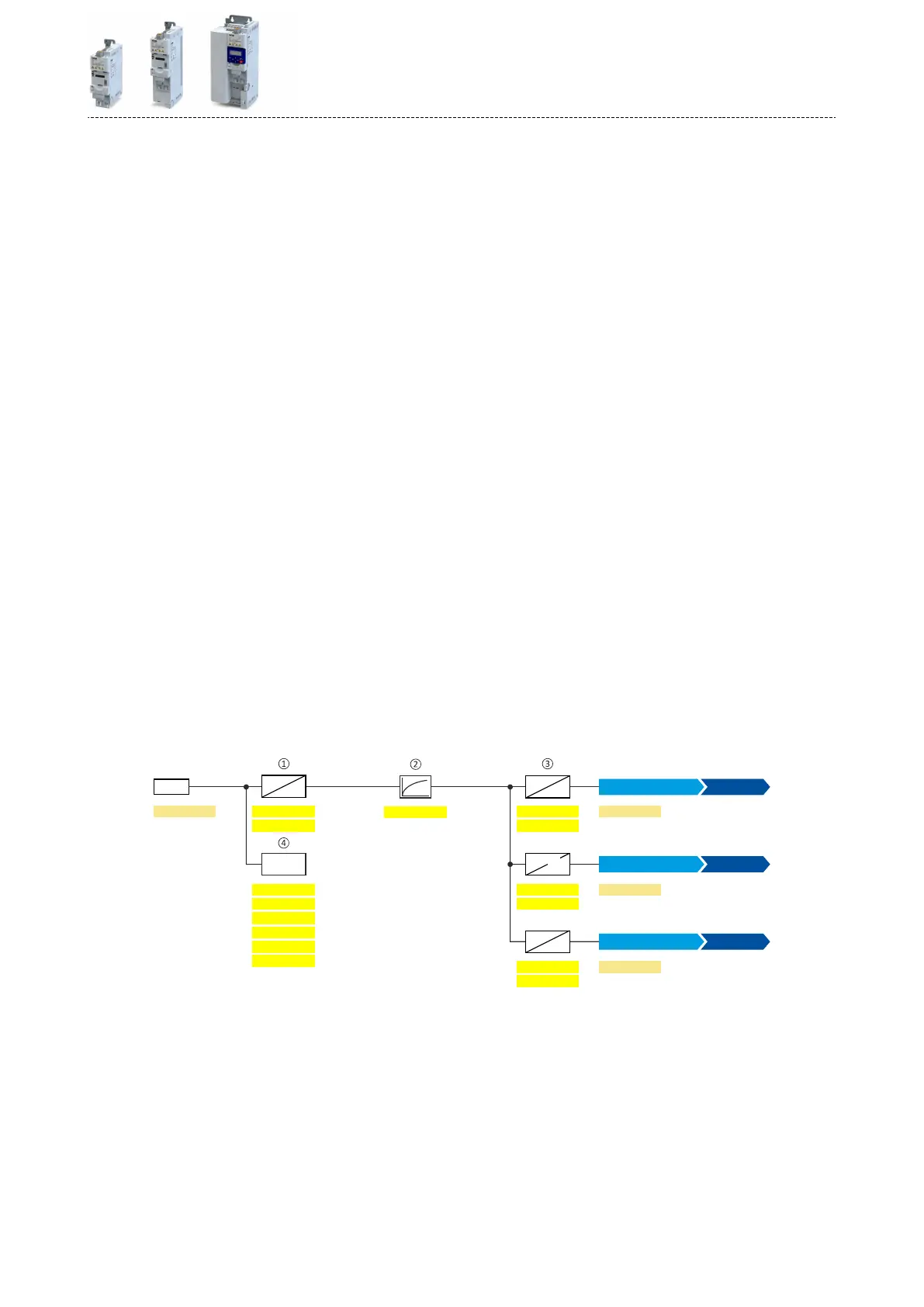
The following sengs are possible for the HTL input:
•
Denion of the input range
①
•
Filter me for low-pass lters
②
•
Denion of the seng range
③
•
Monitoring of the input signal
④
DI4
0x2640:0030x2640:001
%
Hz
0x2640:009
0x2640:004
0x2640:005
0x2640:006
%
PID
X3
%
Hz
0x2642:002
0x2642:003
0x2860:001
0x2860:002
[Hz]
[PID unit]
0x2640:007
0x2640:008
%
%
0x2642:004
0x2860:003
[%]
unit
0x2641:001
0x2641:002
0x2641:003
0x2641:004
0x2641:005
0x2641:006
0x2642:001
0x2640:002
[Hz]
f x Hz
<
>
HTL input [4]
Torque setpoint source
HTL input [4]
Process controller setpoint source
Frequency setpoint source
HTL input [4]
I/O extensions and control connecons
Congure digital inputs
Congure digital inputs DI3/DI4 for detecng a pulse train
249

 Loading...
Loading...






