7 Theory Excurse
This section provides some additional background information on the topics of Registration.
7.1 Six Degrees of Freedom
As we have seen, constraints exist in ScanWorlds’ ControlSpaces. Alignment transformations of a
ScanWorld in a registration are as accurate as its constraints describe.
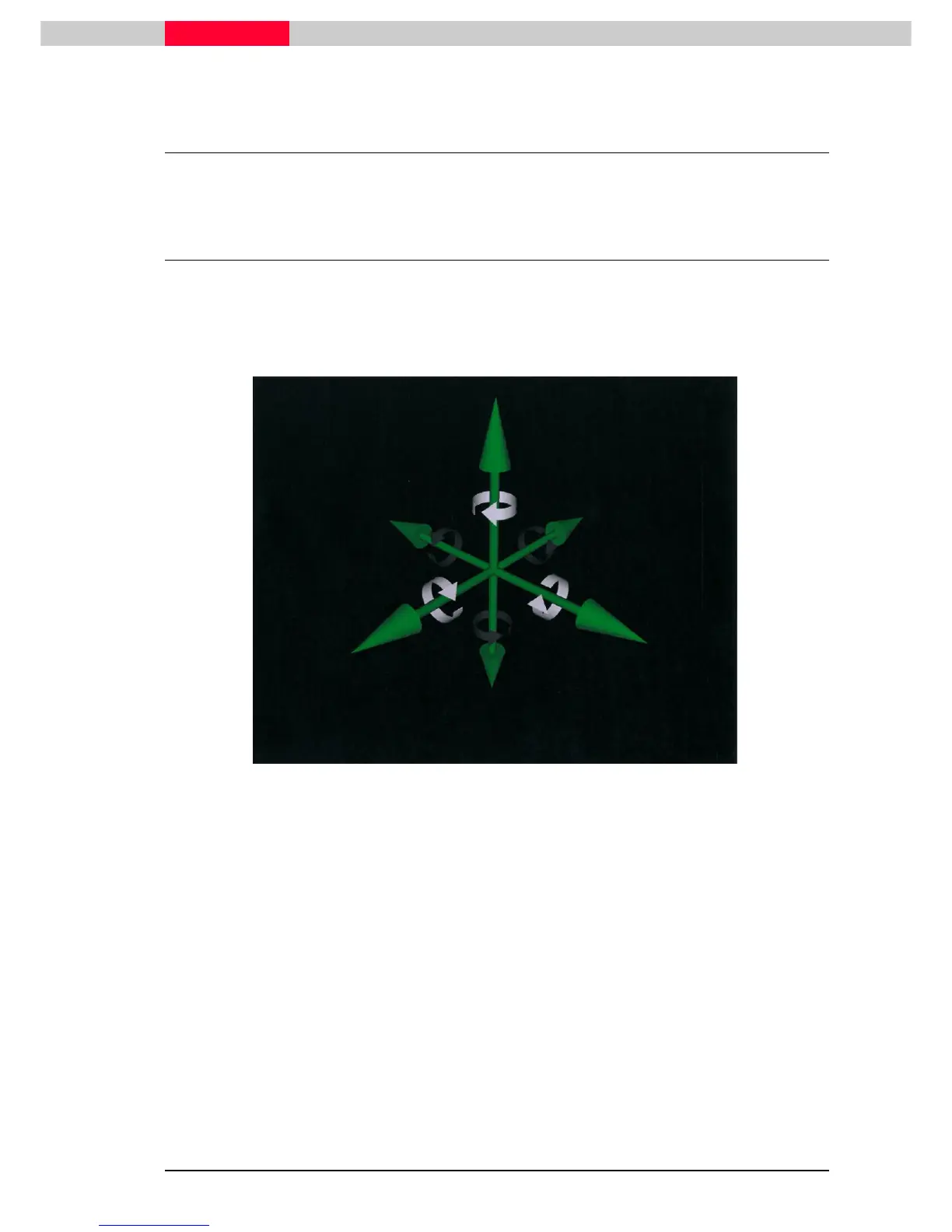
The key to successfully registering a ScanWorld is to constrain it in all six degrees of freedom
(movement in X, Y, and Z and rotation around the X, Y, and Z axis).
Figure 65
•
The minimum number of common tie-points it takes to register two ScanWorlds is 3
(assuming no cloud constraints are used).
•
If ScanWorlds have been scanned with an activated compensator, only 2 tie-points are
required. In these cases the ScanWrorls are marked as “leveled”, the position of the vertical
axis is fixed and hence only a 4 parameter transformation is being calculated (movement in
x,y,z and translation only around z)
•
It is also possible to register ScanWorlds together using only a cloud constraint. For this it is
necessary that the overlapping area scanned is sufficient to lock the ScanWorld in all six
degrees of freedom (e.g. ideally if the overlapping area is in a corner).
Two scans may only overlap in a single plane (e.g. floor). In this case, the cloud constraint
behaves much like a plane-plane constraint (movement in X and Y are unconstrained degrees
of freedom )
•
When a cloud constraint is underconstrained (e.g. floor) it can be combined with tiepoint
constraints to lock down the Registration of the two ScanWorlds (2 additional tie points
needed).