3 Factors that determine the Effectiveness of
PointCloud Constraints
Cloud constraints can be created in a Registration using the scanned overlapping areas between
two point clouds. When registering with point cloud constraints, the 2 main factors that will
determine the effectiveness of the constraint are:
•
The geometry of the overlapping points.
•
The number and size of area of overlapping points (minimum 20%).
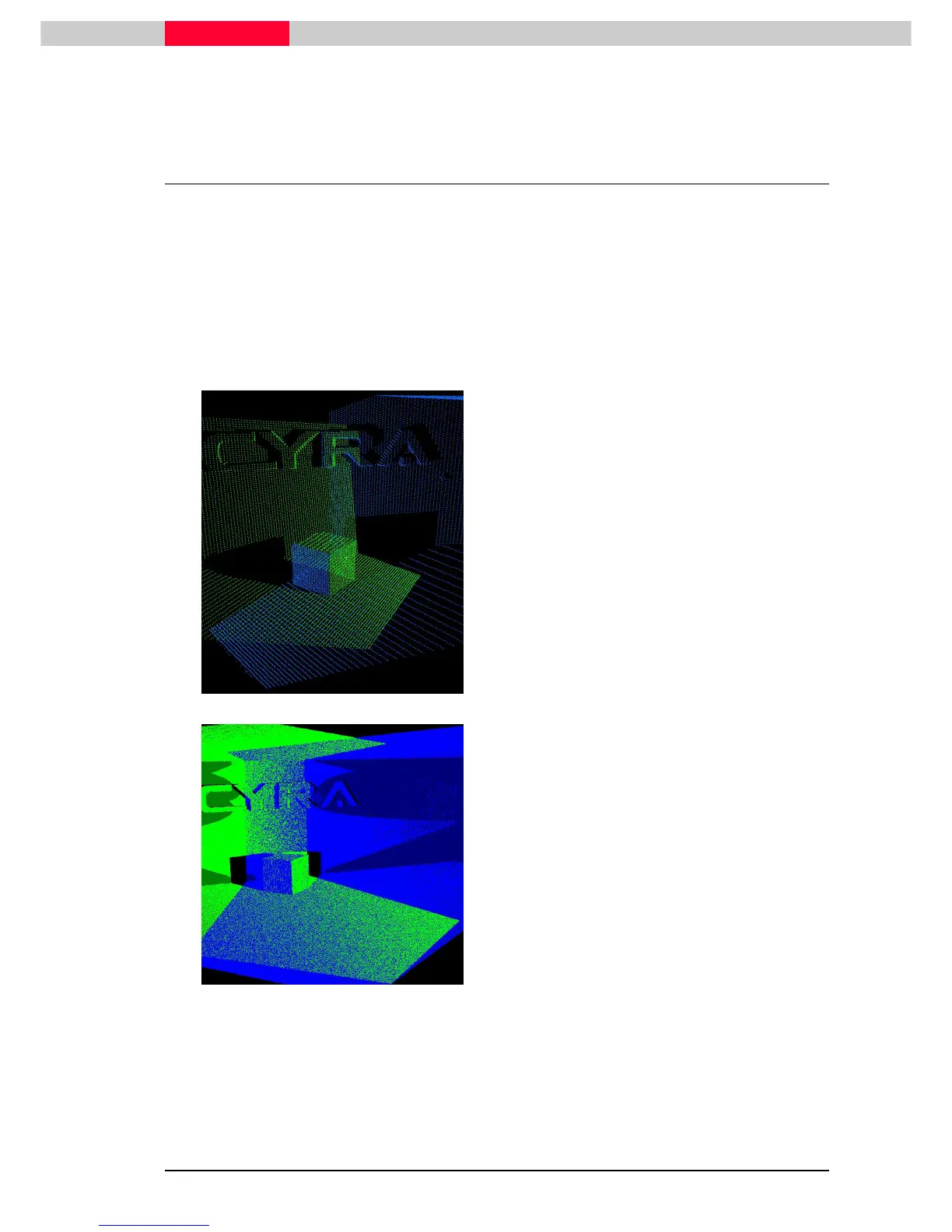
Figure 45
•
Only small overlapping area on floor and wall
•
no overlap on cube
•
Geometry of overlapping scan area:
Underconstrained
•
Number of overlapping points:
Low
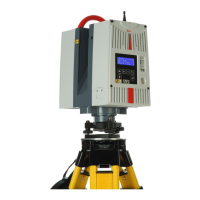
Figure 46
•
Sufficient overlapping area on floor, back
wall, cube
•
Constraining all directions
•
Geometry of overlapping scan area:
Constrained
•
Number of overlapping points:
High
The geometry of the overlapping point clouds is a factor when creating a point cloud constraint.
For example, scans could have a 100% overlap, but the geometry of the overlap may only define
a single plane. Point cloud constraints with little spatial definition between the two clouds
involved can lead to an underconstrained registration. This is the most significant factor when
using point cloud constraints. The second factor that determines the effectiveness of a point