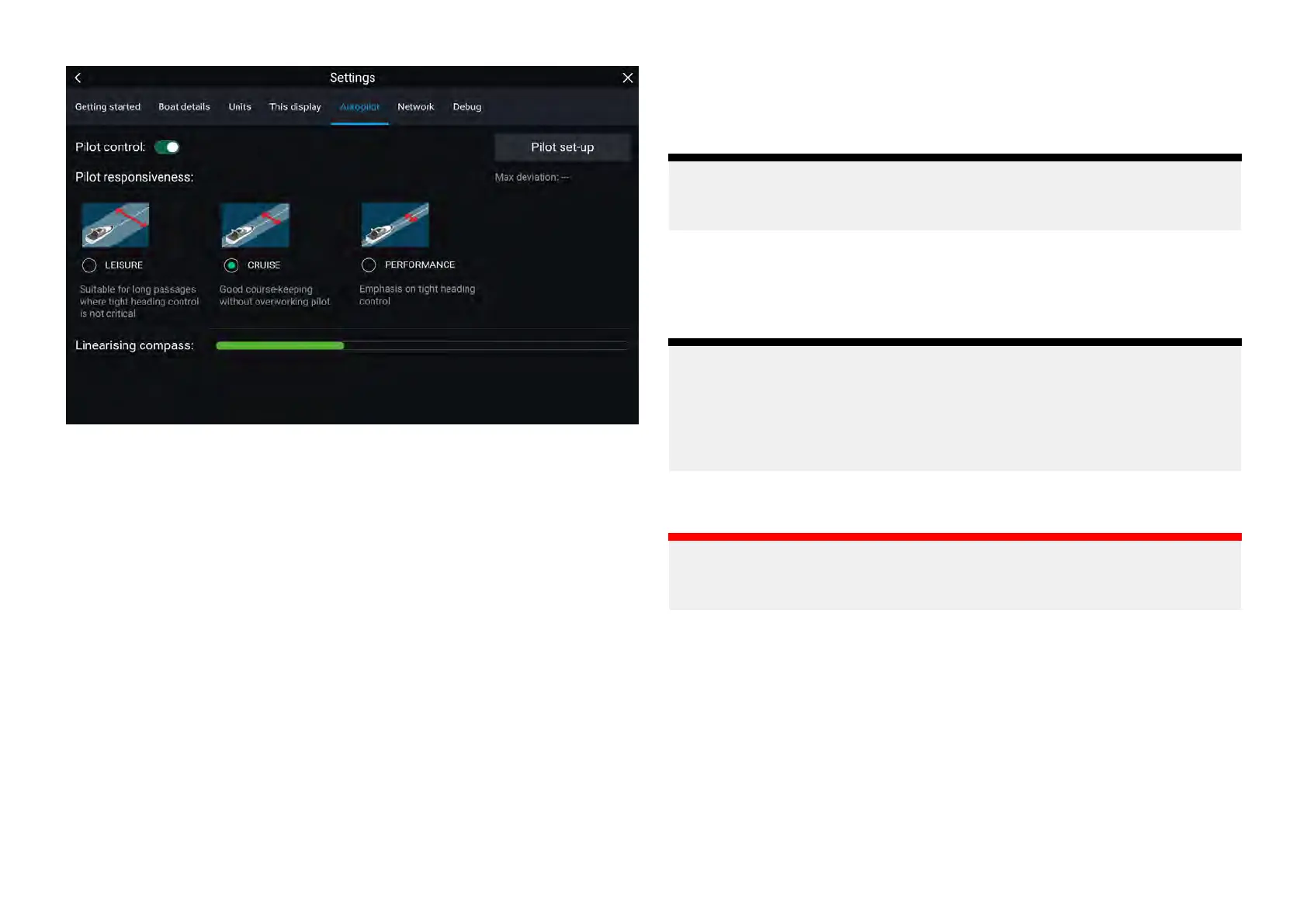
Thelinearizationprocesswillstartautomaticallyafteryourvesselhasturned
appro ximately100°ataspeedofbetween3–15knots.Linearizationrequires
nouserinput,howeveratleasta270°turnisrequiredbeforelinearization
cancomplete.Theprogressbarwillfilltoindicateprogress,theprogress
barwillturnRediftheprocessispausedorotherwiseinterrupted.Timeit
takestocompletethelinearizationwillvaryaccordingtothecharacteristics
ofthevessel,theinstallationenvironmentoftheEVunit,andthelevelsof
magneticinterferenceatthetimeofconductingtheprocess.Sourcesof
significantmagneticinterferencemayincreasethetimerequiredtocomplete
thelinearizationprocess.Examplesofsuchsourcesinclude:
•Marinepontoons
•Metal-hulledvessels
•Underwatercables
Y oucanspeed-upthelinearizationprocessbycompletingafull360°turn
(ataspeedof3–15knots).Y oucanalsorestartthelinearizationprocess
atanytimebyselectingthe[RestartCompass]fromthePilotset-upmenu:
[Homescreen>Settings>Autopilot>Pilotset-up].
OncetheinitiallinearizationiscompletedtheMaximumcompassdeviation
valueisdisplayedunderthe[Pilotset-up]buttonontheAutopilotsettings
page.
Compassdeviation
Ifthereporteddeviationis45°orhigher,itishighlyrecommendedthatthe
EVsensorismovedandre-installedinalocationwhichissubjecttoless
magneticinterference.
Note:
If“--”isdisplayedastheDeviationvalue
,itmeansthatlinearizationhasnot
beensuccessfullycompletedyet.
Checkthecompassheadingdata
Aspartoftheautopilotsystemcommissioningprocess,itisrecommended
thatyoucheckthecompassheadingvaluedisplayed,againstagoodknown
headingsourceonvariousheadings.
Note:
Oncethelinearizationprocesshascompleted,itispossiblethatthe
headingvaluemayhaveaslightoffsetof2to3degrees.Thisiscommon
whereinstallationspaceislimited,andtheEVsensorcannotbeproperly
alignedtothevessel'slongitudinalaxis.Inthiscase,itispossibleto
manuallyadjustthe[Compassoffset]value.
ThecompassoffsetcanbeadjustedfromthePilotset-upmenu:[Homescreen
>Settings>Autopilot>Pilotset-up>Compassoffset].
Important:
DoNOTrelyonthereportedheadinguntilcompasslinearizationand
alignmentiscomplete.
Systemmonitoringandadaptation
Toensureoptimumperformance,aftertheinitiallinearizationprocessis
completetheEVcontinuestomonitorandadaptthecompasslinearizationto
suitcurrentconditions.
Iftheconditionsforlinearizationarelessthanideal,theautomatic
linearizationprocesstemporarilypausesuntilconditionsimproveagain.The
followingconditionscancausethelinearizationprocesstotemporarilypause:
•Boatspeed<3knots.
•Boatspeed>15knots.
•Rate-of-turnistooslow.
A utopilotintegration
121

 Loading...
Loading...