•Marinepontoons
Magneticdeviation
Magneticdeviationistheerrorinducedinacompasscausedbyinterference
fromlocalmagneticfields.
Theautomaticlinearizationprocessresultsinadeviationvaluebeingsetfor
yourAR200
.IfAugmentedRealityflagsintheVideoapparenotalignedwith
theironscreenobjects,orthecompassisoutofalignment,youshouldcheck
theAR200’scurrentcalibrationsettings.Forinstructionsonhowtodothis,
refertothefollowingsection:p.401—AR200calibrationsettings
AR200calibrationsettings
ThecalibrationsettingspageprovidesaccesstotheAR200’scompass
calibrationoptions.
TheAR200calibrationpagecanbeaccessedusingyourdatamasterMFD;
fromtheHomescreenselect:[Settings>Network>Datasources>Heading
>AR200>Calibrate].
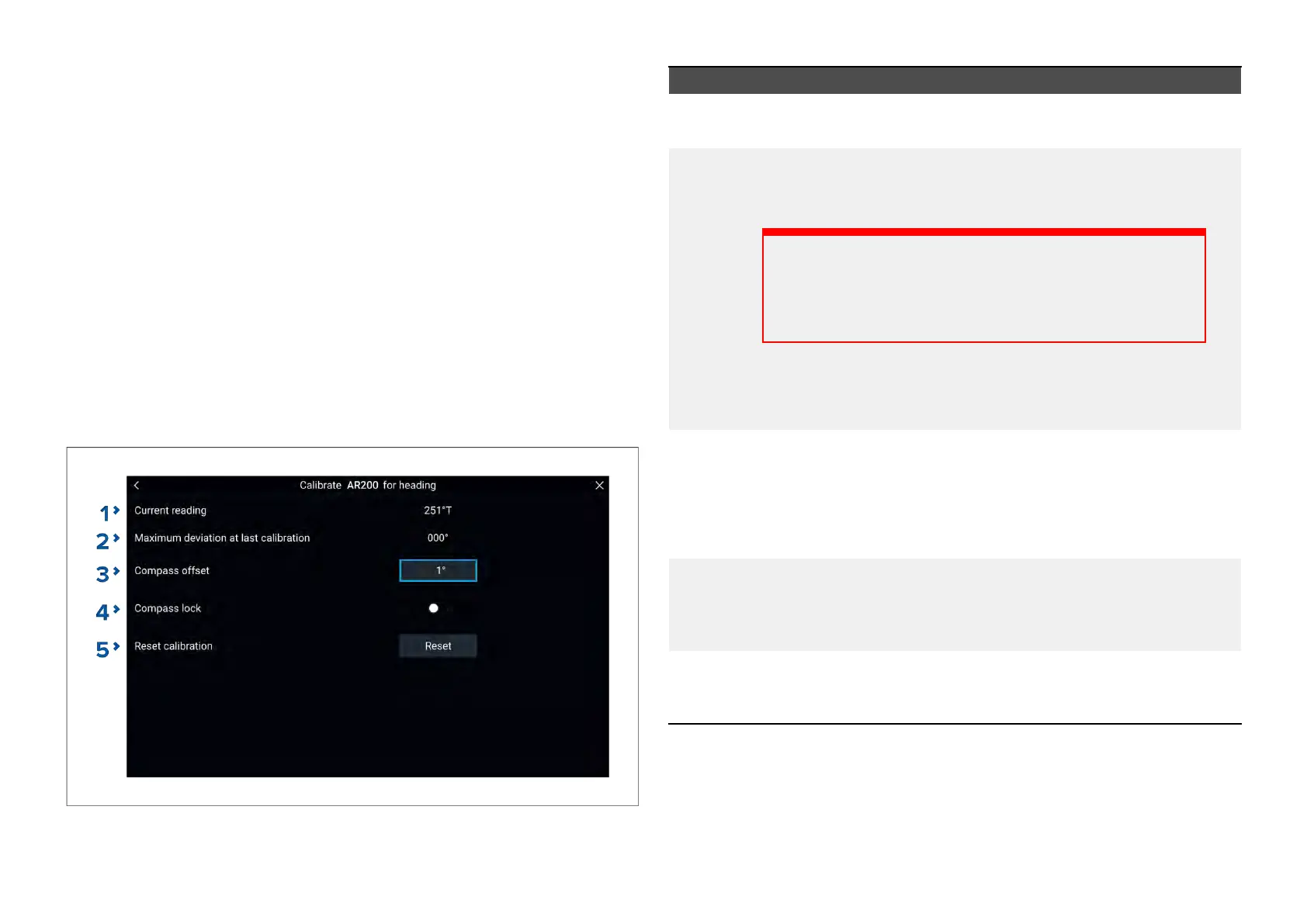
Item
Description
1
[Currentreading:]
ThecurrentheadingreportedbytheAR200
.
2[Maximumdeviationatlastcalibration:]
Themaximumdeviationreportedduringthelastlinearization
process.
Important:
Ifthe[Maximumdeviationatlastcalibration]is45°or
above
,itisrecommendedthattheAR200unitismoved
andre-installedinalocationwhichissubjecttoless
magneticinterference.
[Calibrationinprogress:]
Whilelinearizationisinprogresstheprogresspercentageis
displayed.
3[Compassoffset]
Oncethelinearizationprocesshascompleted,itispossible
thattheheadingvaluemaybeslightlyoutofalignment.Thisis
commonwhereinstallationspaceislimitedandtheAR200is
notproperlyalignedwithyourvessel’
slongitudinalaxis.Inthis
case,itispossibletomanuallyadjusttheCompassoffset.
4
[Compasslock]
Whenenabled,theCompasslockpreventsthecontinual
monitoringandadaptationofthecompasslinearizationprocess.
Formoreinformation,referto:p
.402—Compasslock.
5
[Resetcalibration]
Y oucanresetyourAR200’scurrentlinearizationsettingsby
selecting[Resetcalibration]
Continualmonitoringandadaptation
Toensureoptimumperformance,aftertheinitiallinearizationprocessis
completetheunitcontinuestomonitorandadaptthecompasslinearization
tosuitcurrentconditions.
ClearCruise(ObjectDetection/VideoAnalytics,andA ugmentedReality)
401

 Loading...
Loading...