FollowingaR
oute(autopilot)
Oncearouteiscreatedorimporteditcanbenavigatedbyperforminga
[Followroute].Whenautopilotintegrationisenabled,performingafollow
routewillcommenceactivenavigationwhichguidesyouthrougheachroute
legtotheroute’sfinalwaypoint.Optionswillalsobeavailabletocontrol
yourautopilot.
Important:
Itisthecaptain
’sresponsibilitytoensurearouteissafetonavigatebefore
commencingthefollow.
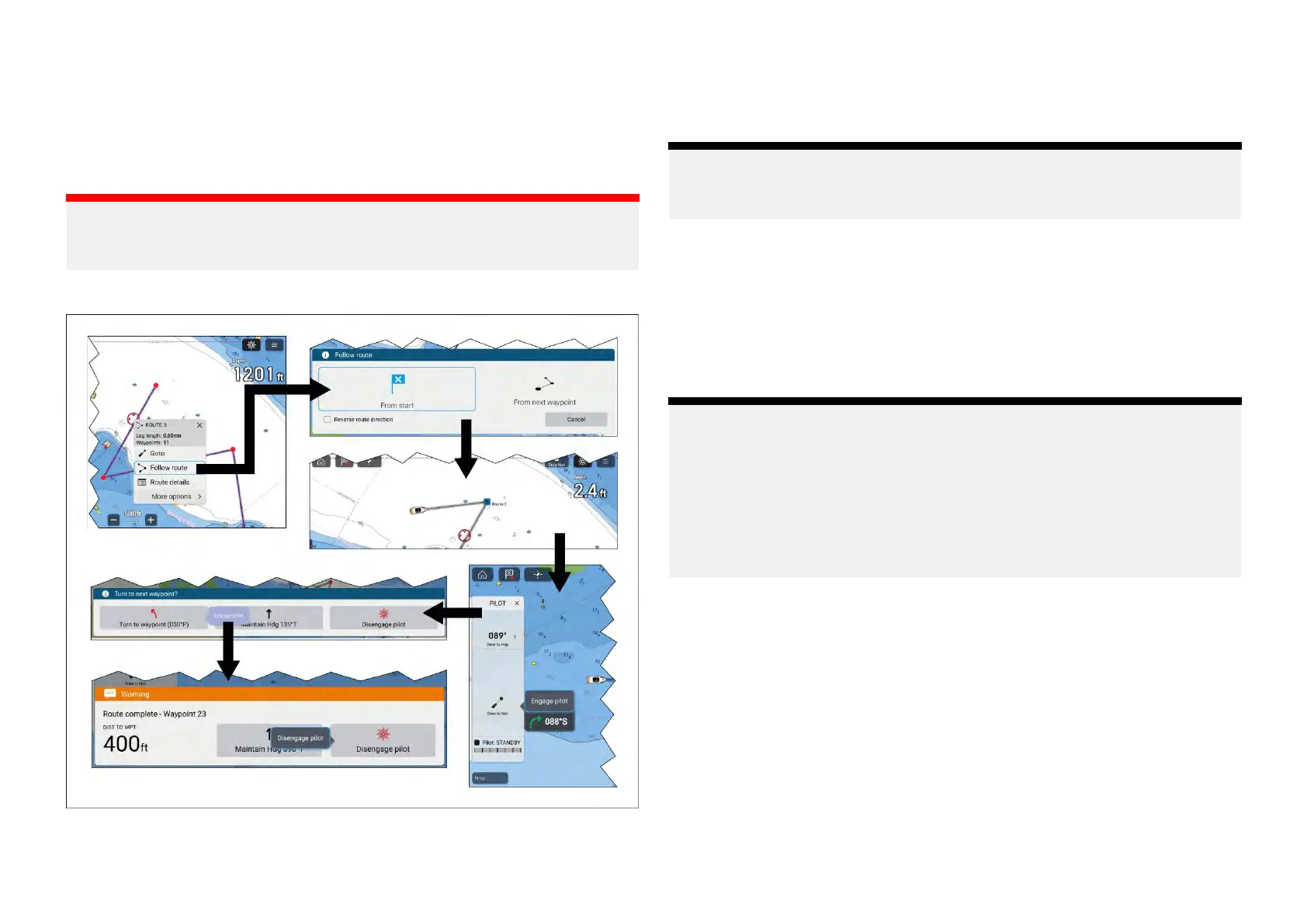
Followthestepsbelowtoperforma[Followroute]usingautopilotsteering:
1.Selectandholdonanyrouteleg(thelinedrawnbetweeneachofthe
route ’swaypoints).
2.Select[FollowRoute]fromthecontextmenu.
Y oucanalsoselectoneoftheroute’swaypointsandselect[more
options]andthen[Followroute].
Note:
Ifyouselectthefirstwaypointinaroutethenthene
xtstepisskippedand
activenavigationcommencesimmediately.
3.SelectthedesiredfollowoptionfromtheFollowroutenotification:
•Select[FromS
tart]tocommenceactivenavigationfromthefirst
waypointintheroute.
•Select[Fromnextwaypoint]tocommenceactivenavigationfromthe
nextwaypointaftertheselectedrouteleg.
•Select[Fromthiswaypoint]tocommenceactivenavigationfromthe
selectedwaypoint.
Note:
•The[Reverseroutedirection]optionallowsyoutopermanentlyreverse
theroute(i.e.:switchthestartandendwaypoint)sothattheroutecan
befollowedintheoppositedirection.T oreversetherouteselectthe
checkboxandthenchooseeitherthedesiredoptionstocommence
activenavigation.
•Iftheselectedwaypointispartofmorethan1routethentheRoutelist
willbedisplayedsothatyoucanchoosewhichrouteyouwanttofollow.
4.Ifrequired,engagethemechanicaldrivebyeitherengagingthewheel
drive’sclutchorattachingthepushrodontothetillerpin.
5.Selectthe[Pilot]iconlocatedatthetopofthescreen.
6.Select[SteertoNav]fromthePilotsidebar.
7.Select[Engagepilot].
Y ourvesselwillturnandnavigatetotheindicatedwaypoint.
8.Thewaypointarrivalalarmwilltriggerwhenyourvesselreachesthe
Waypointarrivalradius(pilotintrackmode).
Thewaypoint[Arrivalradius(pilotintrackmode)]canbesetfromthe
Alarmsmanager:[Homescreen>Alarms>Settings>Arrivalradius(pilot
intrackmode)].The[Arrivalradius(pilotintrackmode)]overridesthe
standard[Arrivalradius]notification.
Chartapp-General
171

 Loading...
Loading...