3.Centerline—Thesolidlinerepresentsthecenterlineofyourvessel.left
ofthecenterlinerepresentsthewater
,objectsandbottomtotheport
sideofyourvessel,rightofthecenterlinerepresentsthestarboardside.
4.Turbulentwater—turbulenceinthewatercausedbysuchthingsas
vesselwakecanproduceasonarreturnduetotheaerationinthewater.
5.Waterdepth—Whenusingaseparatedepthtransducercurrentdepth
canbedisplayedinadataoverlay.
6.Vegetation—Examplesofvegetationgrowth(e.g:trees)onthebottom.
7.Baitball—Exampleofabaitballatanapproximatedistanceof18.5
ftfromyourvessel.
8.Structure—Exampleofbottomstructure.Underwaterstructuressuch
aspipelines,piersandotherlargesolidstructuresmaycauseanareaof
shadowdirectedawayfromyourvessel’sdirection.
9.Vesseldirection—Vesseldirectionoftravel.Thesonarimagewillscroll
fromtoptobottomasyourvesselmoves.
10.Bottom—Solidmassindicatingthebottom,usingthedefaultcolor
palettethebottomiscoloredcopper.Itmaybepossibletoidentify
thetransitionofbottommaterial(e.g.:whereanareaofmudmeetsan
areaofgravel).
RealVision™3Doverview
RealVision™3DandRealVision™Max3Dtransducersproducelife-like3D
sonarimagery.WhenusingaRealVision™3DorRealVision™Max3D
transducerthe[3DVision]channelwillbeavailableintheFishfinderapp.
RealVision™3DandRealVision™Max3Dtransducersarealsocapableof
producingDownVision™,SideVision™andCHIRPconicalsonarchannels.
3DVisionprovidesatrue,easy-to-understandviewofbottomtopography,
debris,andfish.
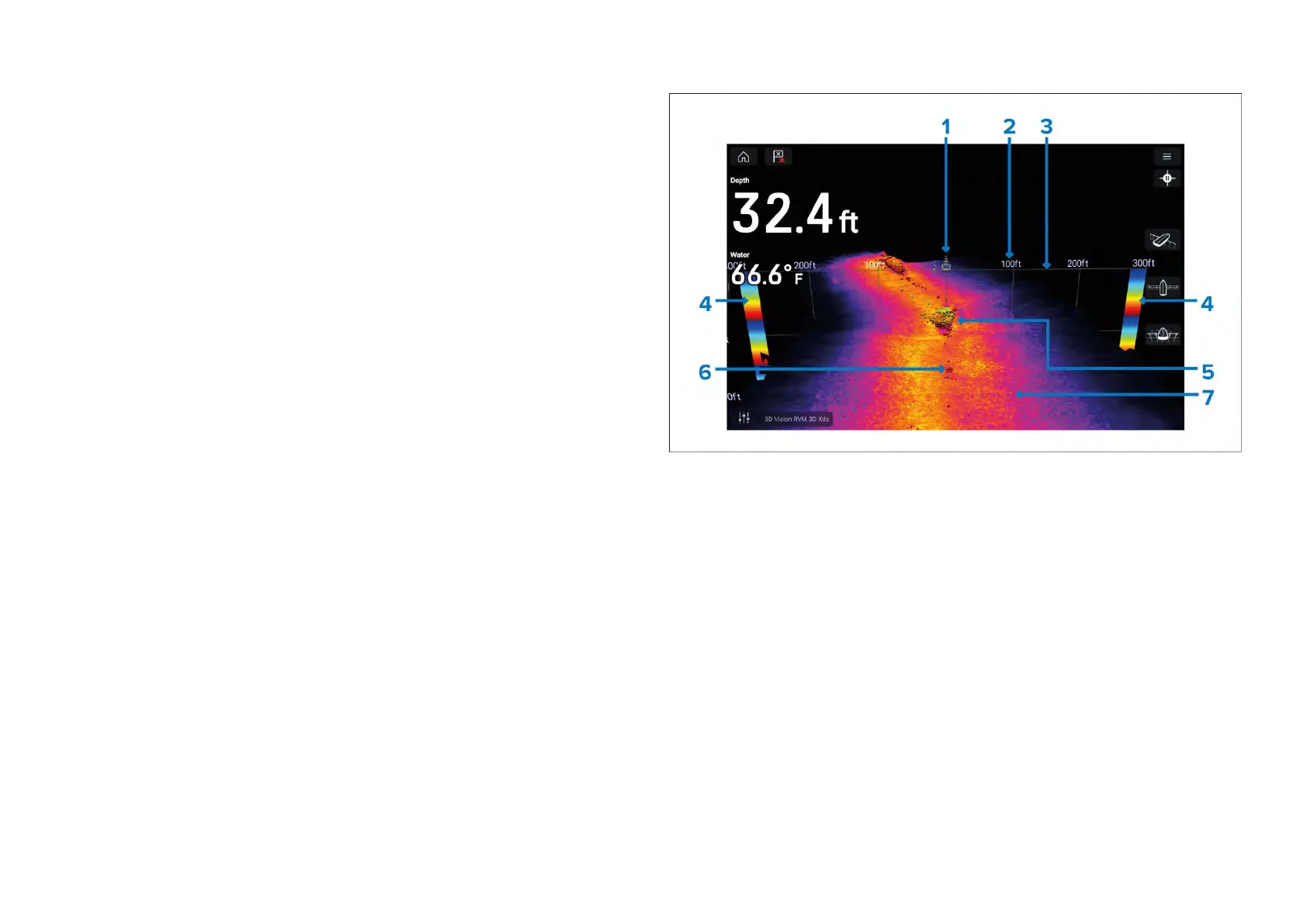
3DVisionscreeninterpretation
1.Vessellocation—Thevesseliconindicateslocationanddirectionof
yourvessel.
2.Rangescale—Therangescaleindicatesdistance(range)toportand
starboardfromyourvessel.
3.Waterline—Thelinerepresentsthetopofthewater.
4.Depthindicator—Providesanindicationofobjectdepths.
5.Structure—Exampleofbottomstructure.Underwaterstructuressuchas
pipelines,piersandotherlargesolidstructures.
6.Sonarreturns—Sonarreturn/detectedobject.
7.Bottom—Solidmassindicatingthebottom.It––maybepossibleto
identifythetransitionofbottommaterial(e.g.:whereanareaofmud
meetsanareaofgravel).
Fishfinderapp
257

 Loading...
Loading...