Navigatingtoawaypointorpointofinterest(autopilot)
Y
oucannavigatetoawaypointorapointofinterestbyperforminga[Goto].
Whenautopilotintegrationisenabled,performinga[Goto]willcommence
activenavigationwhichwillguideyoutoaselecteddestinationandcontrols
willbeavailabletoengageyourautopilot.
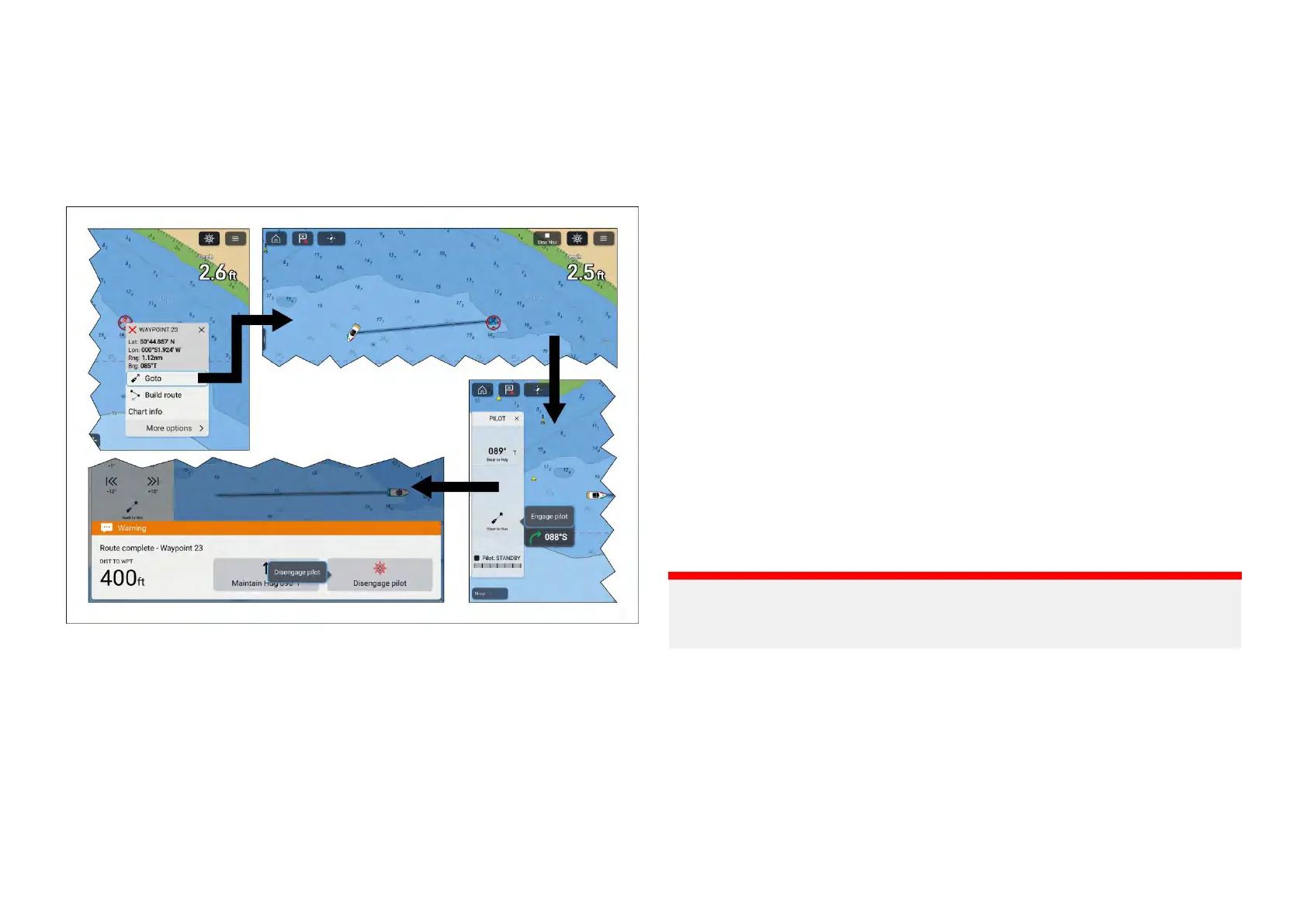
Followthestepsbelowtoperforma[Goto]usingautopilotsteering:
1.Selectandholdonthewaypointorpointofinterestandselect[Goto]
fromtheconte xtmenu.
2.Ifrequired,engagethemechanicaldrivebyeitherengagingthewheel
drive’sclutchorattachingthepushrodontothetillerpin.
3.Selectthe[Pilot]iconlocatedatthetopofthescreen.
4.Select[SteertoNav]fromthePilotsidebar.
5.Select[Engagepilot].
Y ourvesselwillturnandnavigatetotheselectedpoint.
6.Thewaypointarrivalalarmwilltriggerwhenyourvesselreachesthe
Waypointarrivalradius(pilotintrackmode).
Thewaypoint[Arrivalradius(pilotintrackmode)]canbesetfromthe
Alarmsmanager:[Homescreen>Alarms>Settings>Arrivalradius(pilot
intrackmode)].The[Arrivalradius(pilotintrackmode)]overridesthe
standard[Arrivalradius]notification.
7.Select[Disengagepilot]fromthenotificationandthen[Disengagepilot]
fromthepop-over.
8.Alternatively,select[MaintainHdg]fromthenotificationandthen[Engage
pilot]fromthepop-overtomaintainalockedheadingonthecurrent
course.
9.Selectthe[StopNav]onscreeniconlocatedatthetopofthescreenor
select[Stop]fromthecontextmenuor[Navigation]menutoendactive
navigation.
Y oucanendactivenavigationatanytimebyselectingthe[StopNav]
onscreeniconlocatedatthetopofthescreenorselecting[Stop]fromthe
contextmenuor[Navigation]menu.
Formoreinformationonwaypointsandwaypointmanagementreferto:9.1
Waypoints
FollowingaRoute(manualsteering)
Oncearouteiscreatedorimporteditcanbenavigatedbyperforminga
[Followroute].Whenperforminga[Followroute]activenavigationwill
commencewhichguidesyouthrougheachroutelegtotheroute’sfinal
waypoint.
Important:
Itisthecaptain’sresponsibilitytoensurearouteissafetonavigatebefore
commencingthefollow.
Followthestepsbelowtoperforma[Followroute]usingmanualsteering:
Chartapp-General
169

 Loading...
Loading...