Chapter 3
Theory of Operation
P/N 57150002, Revision 5.0 3 - 93 Trimble S, VX, SPS & RTS Service Manual
F
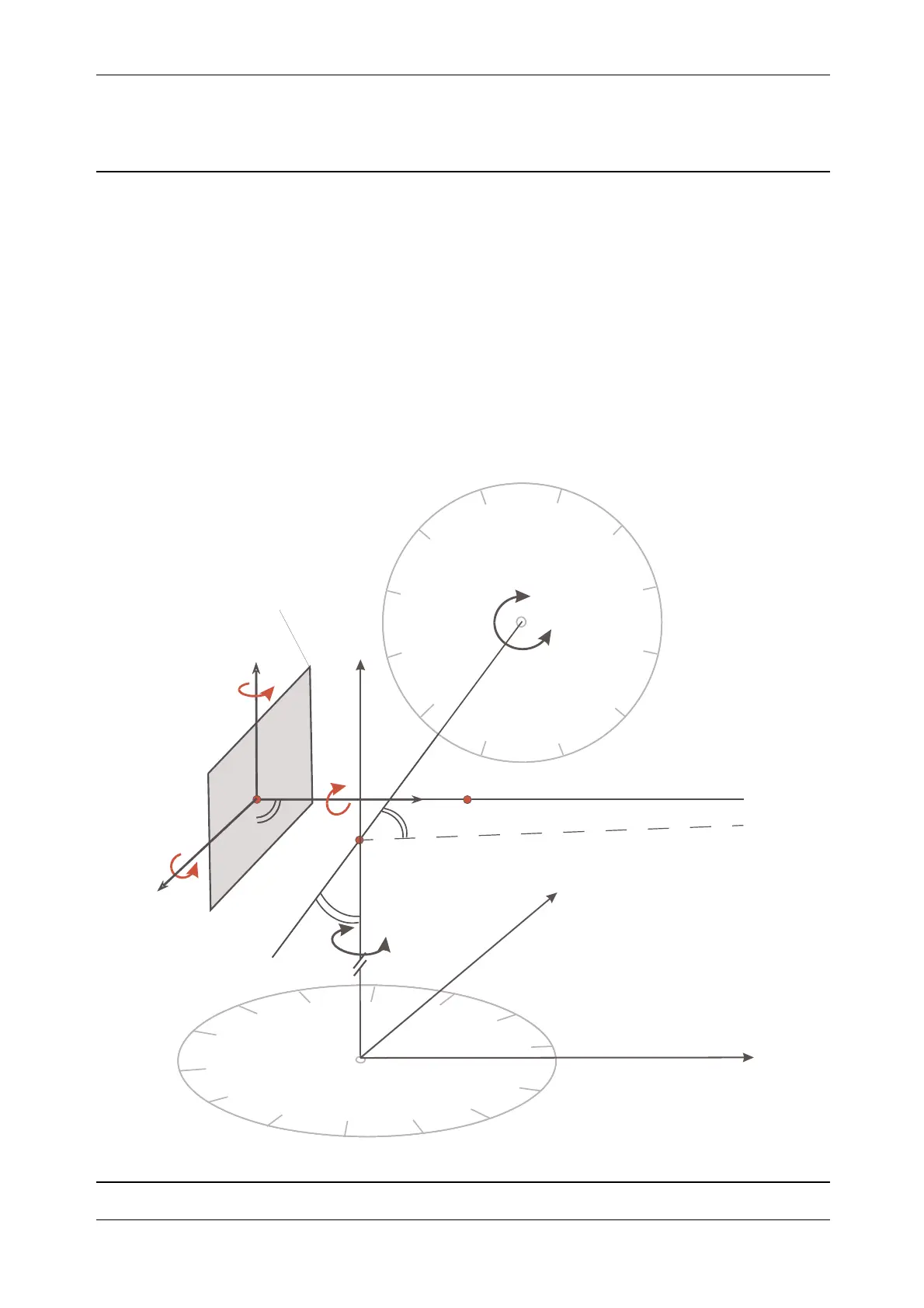
Camera calibration
The calibration algorithm describes the mathematical conditions between the image coordinate
system and the total station coordinate (axis) system. After the calibration the position of the CMOS-
camera referred to the TS angle system is known, defined by:
• - Rotation parameters of the image plane,
• H’(x’
0
, y’
0
) - Principal point where sighting axis intersects the image plane
• ck - Camera Constant = distance from H’ to camera projection centre O
• Camera projection centre O (x
0
, y
0
,z
0
) referred to axis intersection point S (x
S
, y
S
, z
S
)
• Distortion parameters
Fig. 3-86 Photogrammetric camera model referred to TS axis system
Z
X
Y
x
’
y
’
camera axis
theoretical
Hz
-
Circle
V
-
Circle
O
trunnion
Z
cc
K
X
Y
’
’
optical sighting axis
Hz
-
Circle
V
-
Circle
O(x ,y ,z )
trunnion axis
0
00
z
H’(x’ ,y’ )
00
ss s
image plane
S(x ,y ,z )