Advanced-control timers (TIM1&TIM8) RM0008
314/1096 Doc ID 13902 Rev 12
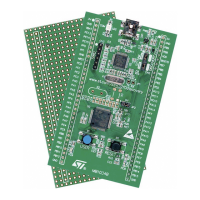
Figure 93. Example of counter operation in encoder interface mode.
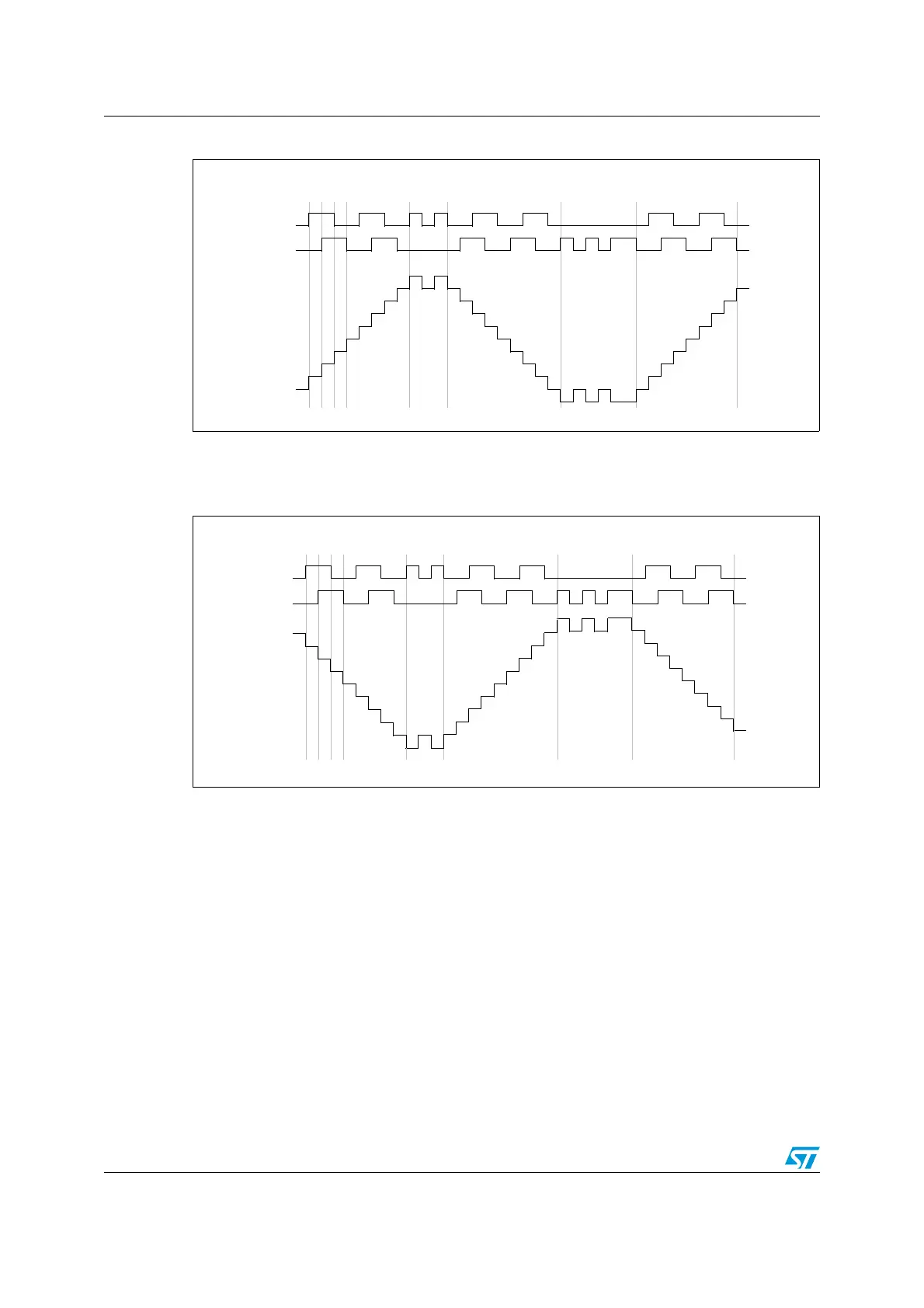
Figure 94 gives an example of counter behavior when TI1FP1 polarity is inverted (same
configuration as above except CC1P=’1’).
Figure 94. Example of encoder interface mode with TI1FP1 polarity inverted.
The timer, when configured in Encoder Interface mode provides information on the sensor’s
current position. You can obtain dynamic information (speed, acceleration, deceleration) by
measuring the period between two encoder events using a second timer configured in
capture mode. The output of the encoder which indicates the mechanical zero can be used
for this purpose. Depending on the time between two events, the counter can also be read
at regular times. You can do this by latching the counter value into a third input capture
register if available (then the capture signal must be periodic and can be generated by
another timer). when available, it is also possible to read its value through a DMA request
generated by a real-time clock.
TI1
forward forwardbackwardjitter jitter
up
down up
TI2
Counter
TI1
forward forwardbackwardjitter jitter
up
down
TI2
Counter
down
 Loading...
Loading...