Variables and Commands CDHD
92 VarCom Reference Manual
FEEDBACKTYPE
Definition Feedback Type
Type Variable (R/W)
Description Gets/set the motor feedback type.
When the value of FEEDBACKTYPE is changed, CONFIG is
required.
Syntax Read: FEEDBACKTYPE
Write: FEEDBACKTYPE <value>
Firmware 1.0.6
Drive status Disabled
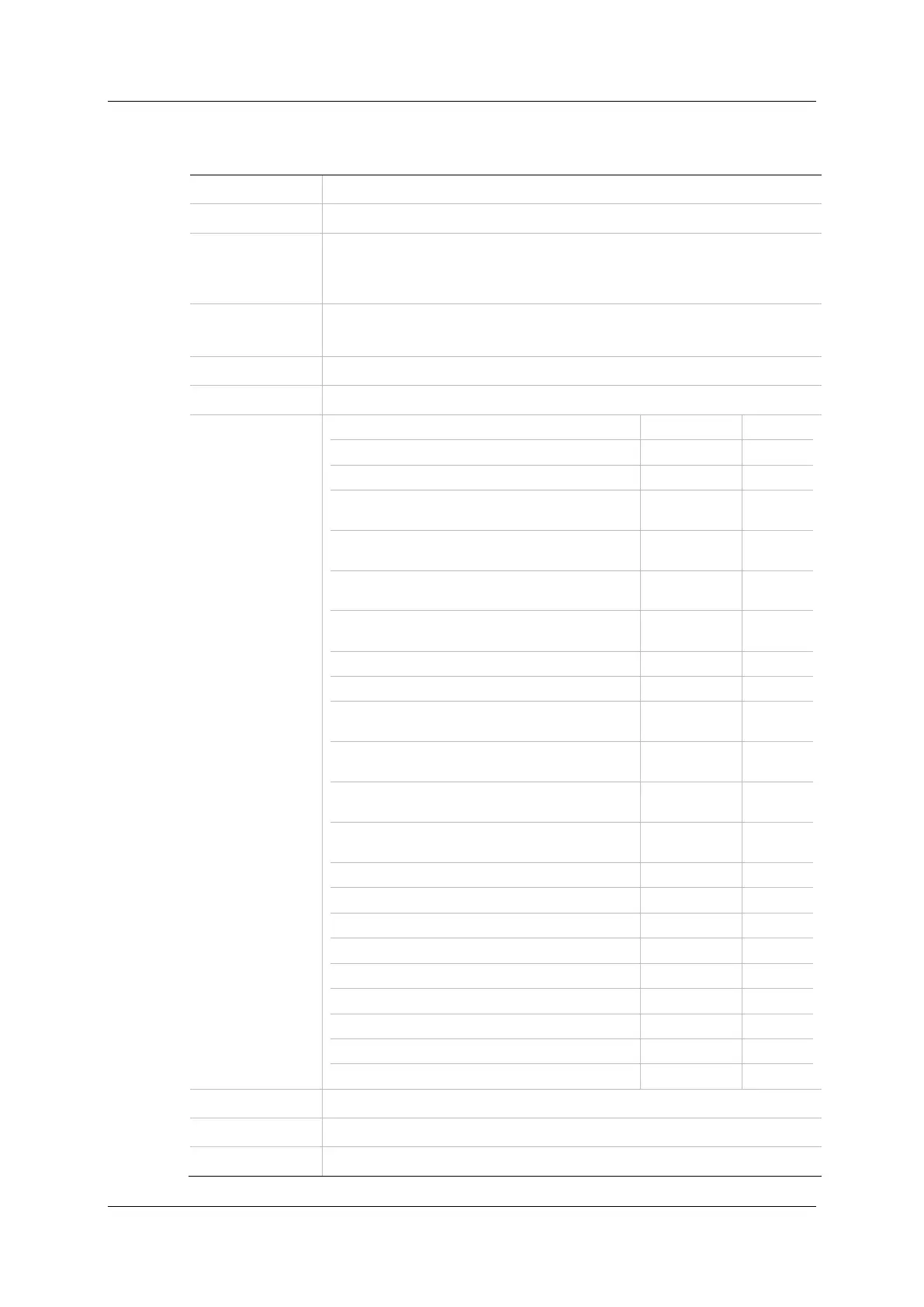
Range
FEEDBACKTYPE
MENCTYPE
Resolver 1 NA
Incremental Encoder A/B/Z/H 2 0
Incremental Encoder A/B/Z Init by
PHASEFIND command
2 1
Incremental Encoder A/B/Z Init by ENABLE
and PHASEFIND command
2 2
Incremental Encoder A/B Init by PHASEFIND
command
2 3
Incremental Encoder A/B Init by ENABLE and
PHASEFIND command
2 4
Incremental Encoder A/B/H 2 6
Sine Encoder A/B/Z/H 3 0
Sine Encoder A/B/Z Init by PHASEFIND
command
3 1
Sine Encoder A/B/Z Init by ENABLE and
PHASEFIND command
3 2
Sine Encoder A/B Init by PHASEFIND
command
3 3
Sine Encoder A/B Init by ENABLE and
PHASEFIND command
3 4
Sine Encoder A/B/H 3 6
Endat 2.2 11 NA
Endat 2.1 with Sine Signals 3 9
Hiperface with Sine Signals 3 10
Nikon Encoder 17-bit ABS Single/Multi turn 4 NA
Tamagawa Incremental Encoder (8 wires) 2 11
Tamagawa Encoder 17-bit ABS Single Turn 7 NA
Tamagawa Encoder 17-bit ABS Multi Turn 6 NA
NA=Not Applicable
Default value 2
Unit Not Applicable
Non-volatile Yes