MPC5604B/C Microcontroller Reference Manual, Rev. 8
322 Freescale Semiconductor
18.6 Functional description
In this section, the functional operation of the MPU is detailed. In particular, subsequent sections discuss
the operation of the access evaluation macro as well as the handling of error-terminated bus cycles.
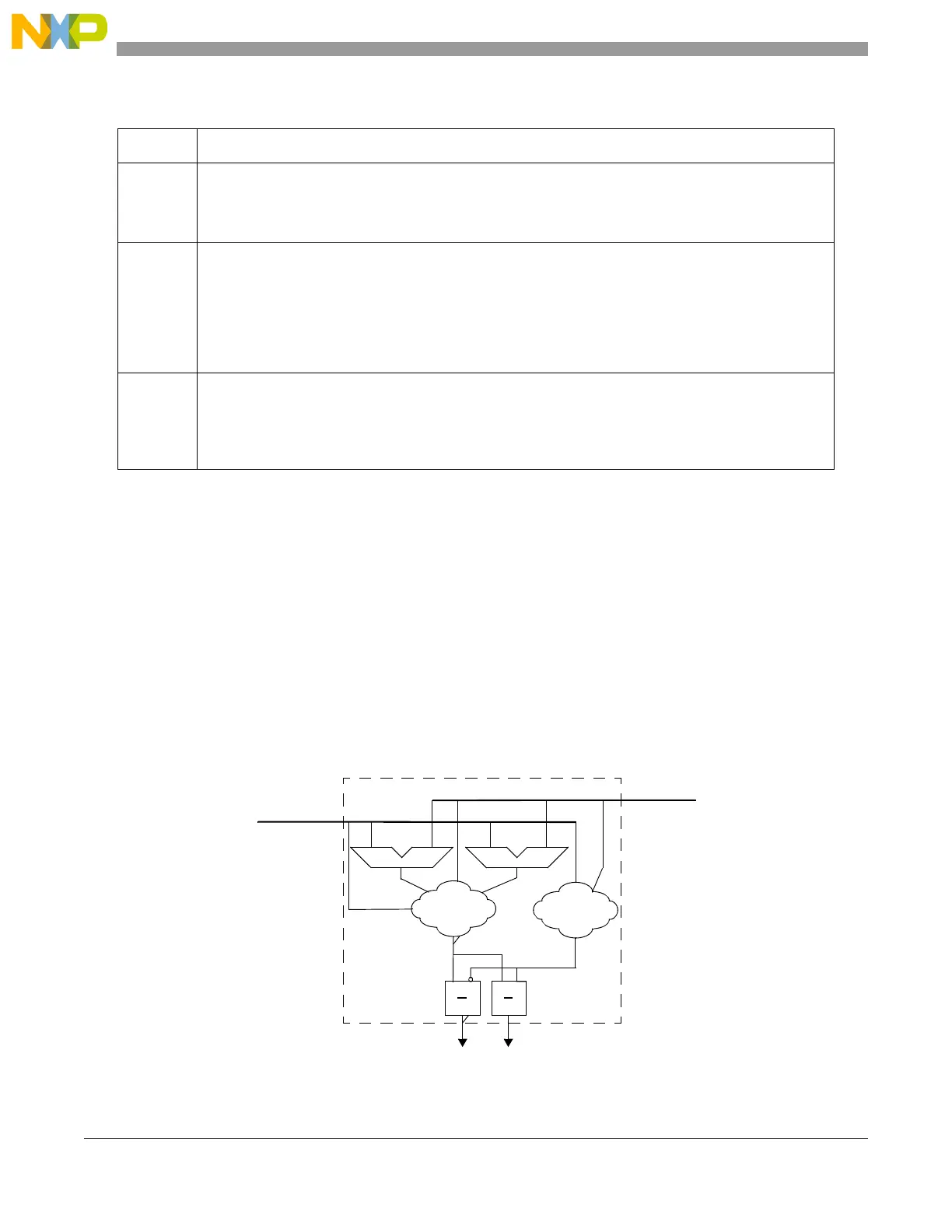
18.6.1 Access evaluation macro
As previously discussed, the basic operation of the MPU is performed in the access evaluation macro, a
hardware structure replicated in the two-dimensional connection matrix. As shown in Figure 18-10, the
access evaluation macro inputs the system bus address phase signals and the contents of a region descriptor
(RGDn) and performs two major functions: region hit determination (hit_b) and detection of an access
protection violation (error).
Figure 18-10. MPU access evaluation macro
M0PE Bus master 0 process identifier enable
If set, this flag specifies that the process identifier and mask (defined in MPU_RGDn.Word3) are to be
included in the region hit evaluation. If cleared, then the region hit evaluation does not include the
process identifier.
M0SM Bus master 0 supervisor mode access control
This field defines the access controls for bus master 0 when operating in supervisor mode. The M0SM
field is defined as:
0b00 r, w, x = read, write and execute allowed
0b01 r, –, x = read and execute allowed, but no write
0b10 r, w, – = read and write allowed, but no execute
0b11 Same access controls as that defined by M0UM for user mode
M0UM Bus master 0 user mode access control
This field defines the access controls for bus master 0 when operating in user mode. The M0UM field
consists of three independent bits, enabling read, write and execute permissions: {r,w,x}. If set, the bit
allows the given access type to occur; if cleared, an attempted access of that mode may be terminated
with an access error (if not allowed by any other descriptor) and the access not performed.
Table 18-9. MPU_RGDAACn field descriptions (continued)
Field Description
hit_b
start end
error
> >
RGDn
System bus
hit & error
hit_b | error
>=
<=
r,w,x
address phase