Chapter 4 Panel Display and Operation ASDA-A2
Revision February, 2017 4-9
4.4 General Function
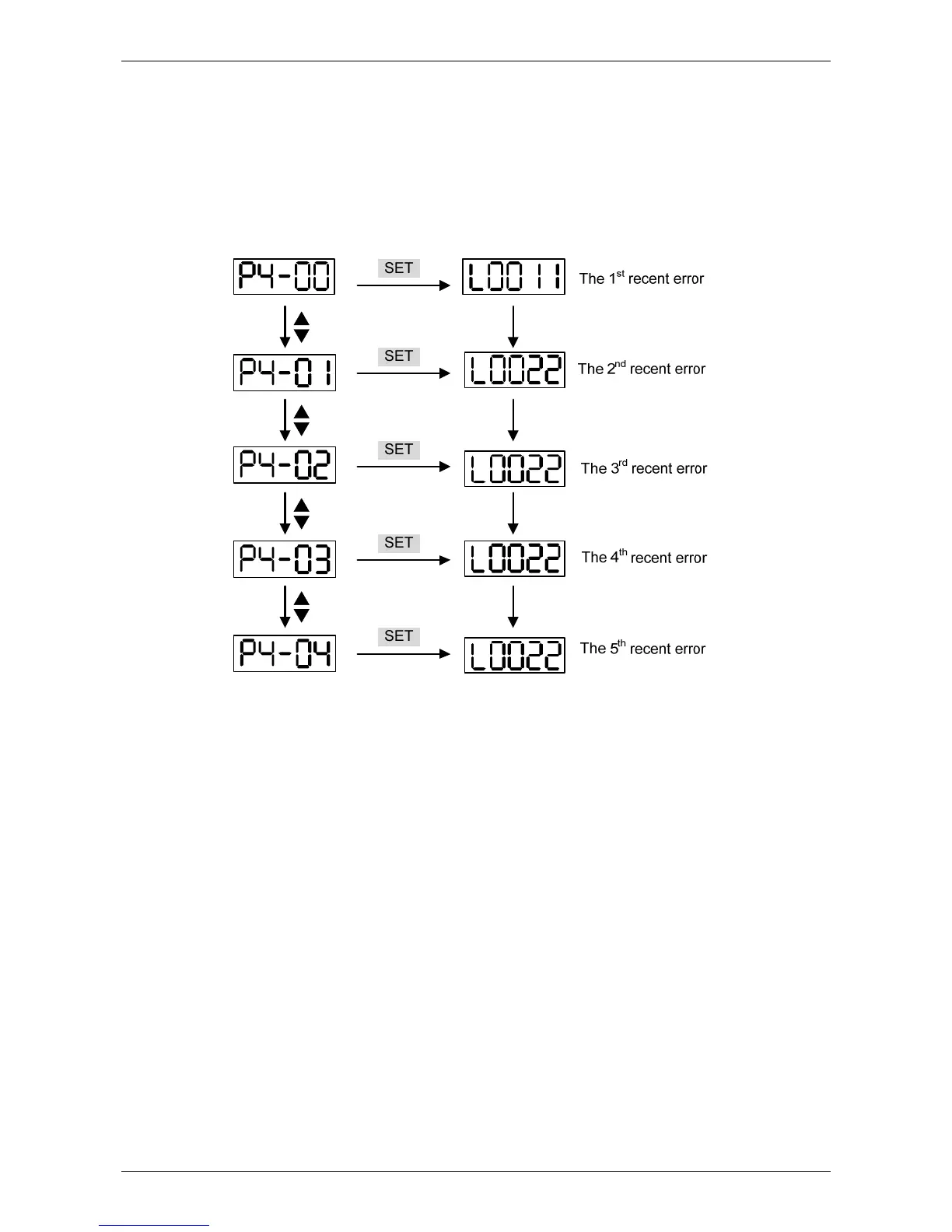
4.4.1 Operation of Fault Record Display
When it is in Parameter Mode, select P4-00~P4-04 and press the SET Key, the corresponding
fault record will be shown
.