Speed control under Real sensorless vector control, vector control, PM sensorless vector
control
PARAMETERS
189
5
Setting the torque limit values during acceleration/deceleration
individually (Pr.816, Pr.817)
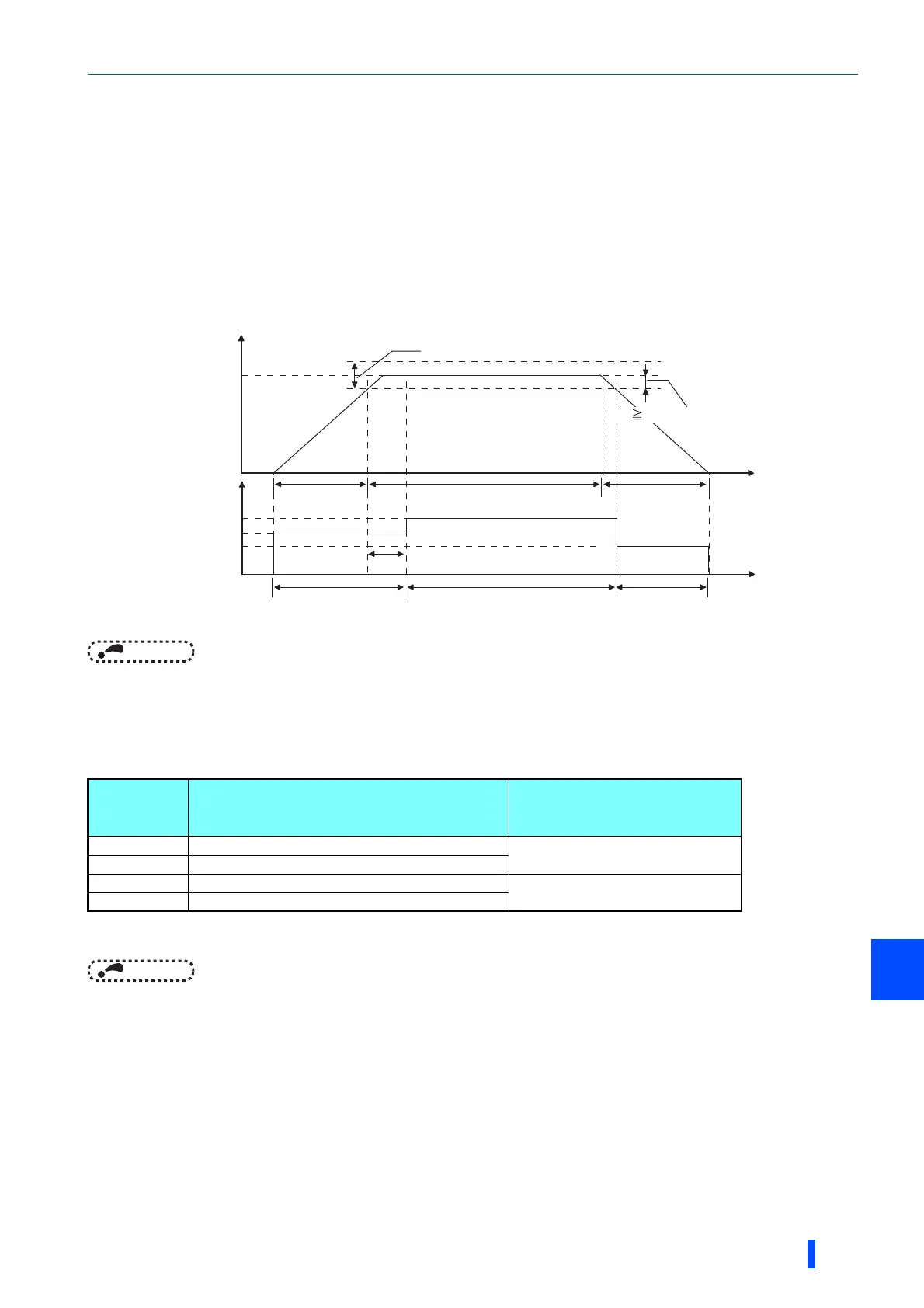
• The torque limit during acceleration and deceleration can be set individually.
Torque limit using the setting values of Pr.816 Torque limit level during acceleration and Pr.817 Torque limit level
during deceleration is shown below.
• If 1 s elapses while the difference between the set speed and rotation speed is within ±2 Hz, the torque limit level during
acceleration/deceleration (Pr.816 or Pr.817) changes to the torque control level during constant speed (Pr.22).
• When the difference between the set speed and rotation speed is -2 Hz or less, the torque limit level during
deceleration (Pr.817) activates.
NOTE
• The Pr.816 and Pr.817 settings are invalid under position control.
Changing the setting increments of the torque limit level (Pr.811)
• The setting increments of Pr.22 Torque limit level and Pr.812 to Pr.817 (torque limit level) can be changed to 0.01% by
setting Pr.811 Set resolution switchover="10, 11".
For the change of the speed setting increments using a communication option, refer to the Instruction Manual of the communication option.
NOTE
• The internal resolution of the torque limit is 0.024% (100/2
12
), and fractions below this resolution are rounded off.
• When Real sensorless vector control is selected, fractions below a resolution equivalent to 0.1% are rounded off even if
Pr.811="10, 11" is set.
• For details on changing the speed setting increments, refer to page 357.
Pr.811
setting
Speed setting, running speed monitor
increments from PU, RS-485 communication,
communication options
Torque limit setting increments
Pr.22, Pr.812 to Pr.817
01 r/min
0.1%
1 0.1 r/min
10 1 r/min
0.01%
11 0.1 r/min
Acceleration Constant speed Deceleration
1s
Pr.816
Torque limit level
during acceleration
Torque limit set to Pr.810
Pr.817
Torque limit level
during deceleration
Set
frequency
Output
frequency
(Hz)
Time
-2 Hz < set speed - rotation speed < 2 Hz
Torque limit
level
-2 Hz set speed - rotation speed

 Loading...
Loading...






