Real sensorless vector control, vector control, PM sensorless vector control adjustment
254
PARAMETERS
5.6 Real sensorless vector control, vector
control, PM sensorless vector control
adjustment
5.6.1 Speed detection filter and torque detection
filter
These parameters are available when FR-A8AP (option) is installed.
Stabilizing speed detection (Pr.823, Pr.833)
• Speed loop response is reduced. Under ordinary circumstances, therefore, use the initial value as it is.
If there is speed ripple due to high frequency disturbance, adjust until speed stabilizes by gradually raising the setting.
Speed is oppositely destabilized if the setting value is too large.
• This setting is valid under vector control only.
Stabilizing torque detection (Pr.827, Pr.837)
• Current loop response is reduced. Under ordinary circumstances, therefore, use the initial value as it is.
If there is torque ripple due to high frequency disturbance, adjust until speed stabilizes by gradually raising the setting.
Speed is oppositely destabilized if the setting value is too large.
Employing multiple primary delay filters
• Use Pr.833, Pr.837 if changing filter according to application. Pr.833, Pr.837: Second function selection (RT) signal
NOTE
• The RT signal is a second function selection signal. The RT signal also enables other second functions. (Refer to page 434.)
• The RT signal is assigned to the terminal RT in the initial setting. Set "3" in any of Pr.178 to Pr.189 (input terminal function
selection) to assign the RT signal to another terminal.
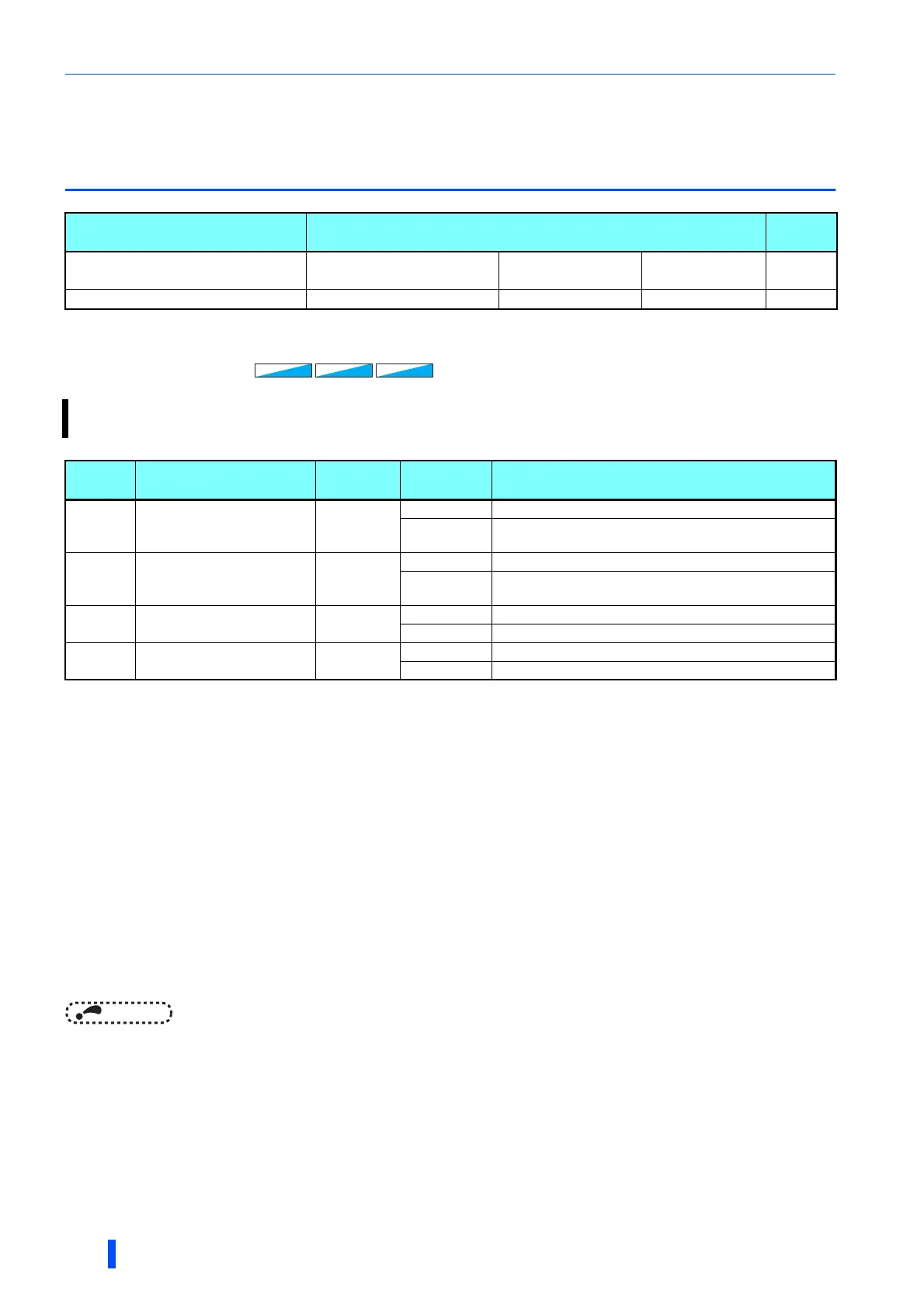
Purpose Parameter to set
Refer
to page
To stabilize speed and torque
feedback signal.
Speed detection filter
Torque detection filter
P.G215, P.G216,
P.G315, P.G316
Pr.823, Pr.827,
Pr.833, Pr.837
254
To changes excitation ratio Excitation ratio P.G217 Pr.854 255
Set the time constant of primary delay filter for speed feedback signal and torque feedback signal.
Speed loop response is reduced. Under ordinary circumstances, therefore, use the initial value as it is.
Pr. Name
Initial
value
Setting
range
Description
823
G215
Speed detection filter 1
0.001 s
0 Without filter
0.001 to 0.1 s
Set the time constant of primary delay filter for speed
feedback signal.
827
G216
Torque detection filter 1
0 s
0 Without filter
0.001 to 0.1 s
Set the time constant of primary delay filter torque
feedback signal.
833
G315
Speed detection filter 2
9999
0 to 0.1 s Second function of Pr.823 (enabled when RT signal ON)
9999 Same as Pr.823 setting
837
G316
Torque detection filter 2
9999
0 to 0.1 s Second function of Pr.827 (enabled when RT signal ON)
9999 Same as Pr.827 setting
Sensorless
Sensorless
Vector
Vector
PM
PM

 Loading...
Loading...






