(G) Control parameters
PARAMETERS
629
5
GROUP
G
NOTE
• Setting of the droop gains should be approximately the rated slip of the motor.
Limiting the frequency after the droop compensation (0 limit)
• By setting Pr.288 at the time of Real sensorless vector control, vector control, or PM sensorless control, the negative
frequency command when the frequency after droop compensation can be limited.
During Advanced magnetic flux vector control, the action same as the "0" setting will be performed.
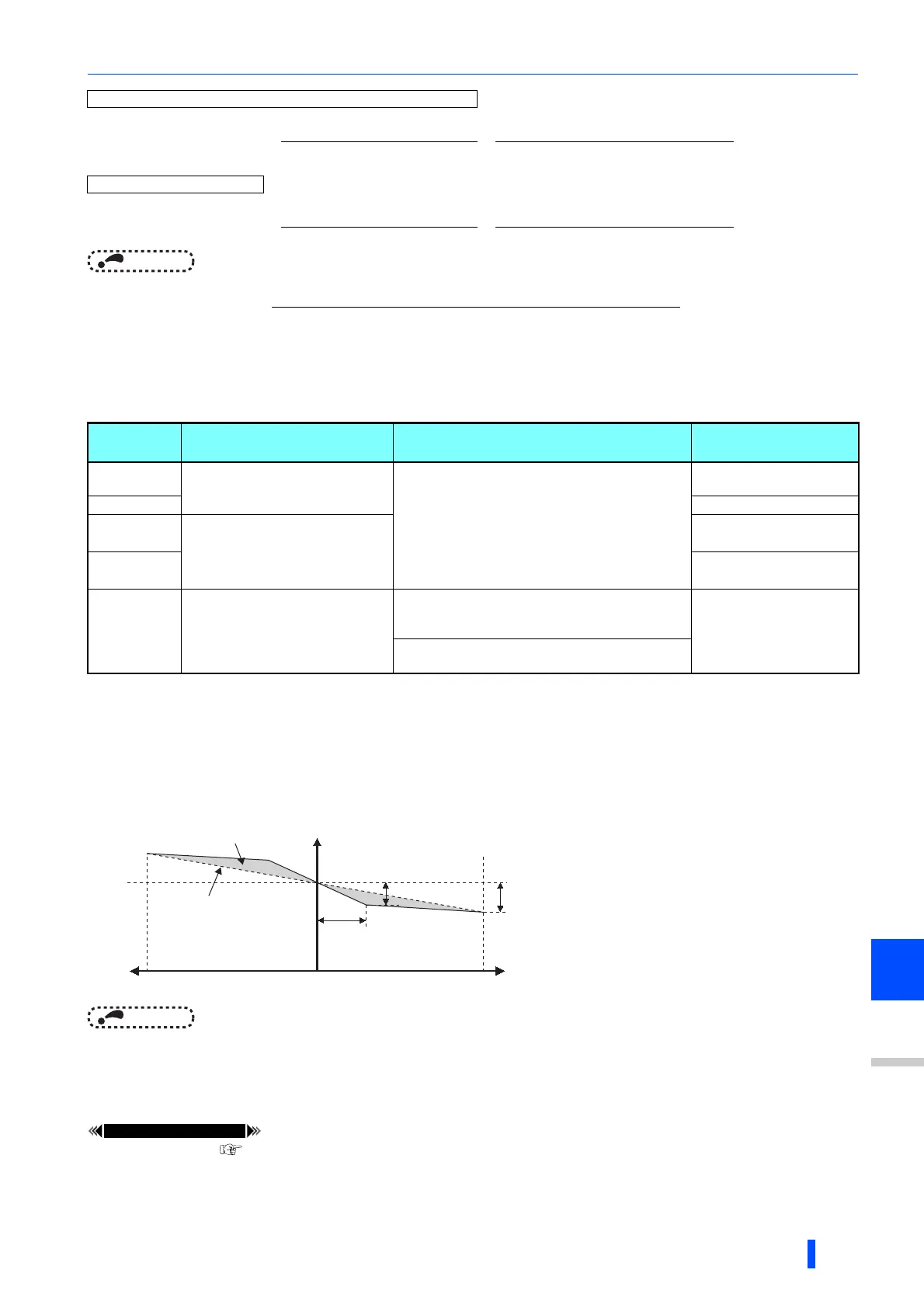
Droop control break point setting (Pr.994, Pr.995)
• By setting Pr.994 and Pr.995, break point (1 point) can be set up for the droop compensation frequency. Setting a break
point allows the inverter to raise the droop compensation frequency for light-load (no load) operation without raising it for
heavy-load operation.
NOTE
• Droop break point function is disabled in one of following conditions. (Linear compensation by Pr.286 will be performed.)
Pr.995 = "100% (initial value)"
Pr.286 <Pr.994
Pr.994
Pr.995 Pr.286 / 100%
Pr.1 Maximum frequency page 345
When Pr.288 = "0 to 2" or Advanced magnetic flux control
Droop compensation frequency =
Current for torque after filtering
Rated motor frequency droop gain
Rated torque current 100
When Pr.288 = "10, 11"
Droop compensation frequency =
Current for torque after filtering
Motor speed droop gain
Rated torque current 100
Rated slip =
Synchronized speed at the time of base frequency - rated rotation speed
100[%]
Synchronized speed at the time of base frequency
Pr.288
Setting
Operation
When the droop compensation frequency
is negative
Droop compensation
reference
0
(initial value)
Without droop control during
acceleration/deceleration
Limit with 0 Hz
(Limit with 0.5 Hz under Advanced magnetic flux
vector control)
Rated motor frequency
10
Motor speed
1
Constantly droop control during
operation
Rated motor frequency
11
Motor speed
2
Constantly droop control during
operation
Do not limit (reverse)
(At the time of vector control, PM sensorless vector
control)
Rated motor frequency
Limit with 0 Hz
(At the time of Real sensorless vector control)
Droop break point gain
(Pr.994)
Droop compensation
frequency
Increased amount of the
droop compensation
frequency
Droop break point torque
(Pr.995)
Torque
100%
Droop gain
(Pr.286)
-100%
Frequency
0
Rated
frequency

 Loading...
Loading...






