2 BCN-C22005-697
• Set "55 (positive logic)" or "155 (negative logic)" in any of Pr.190 to Pr.196 (output terminal function selection)
to output the motor temperature detection signal (Y55).
NOTE
• The motor temperature monitor and the Y55 signal are available when the FR-A8AZ is used.
• For the details of the FR-A8AZ, refer to the Instruction Manual of the FR-A8AZ.
FR-A8APR
• Using the FR-A8APR and a motor with a resolver together enables vector control using detection signals from the
resolver.
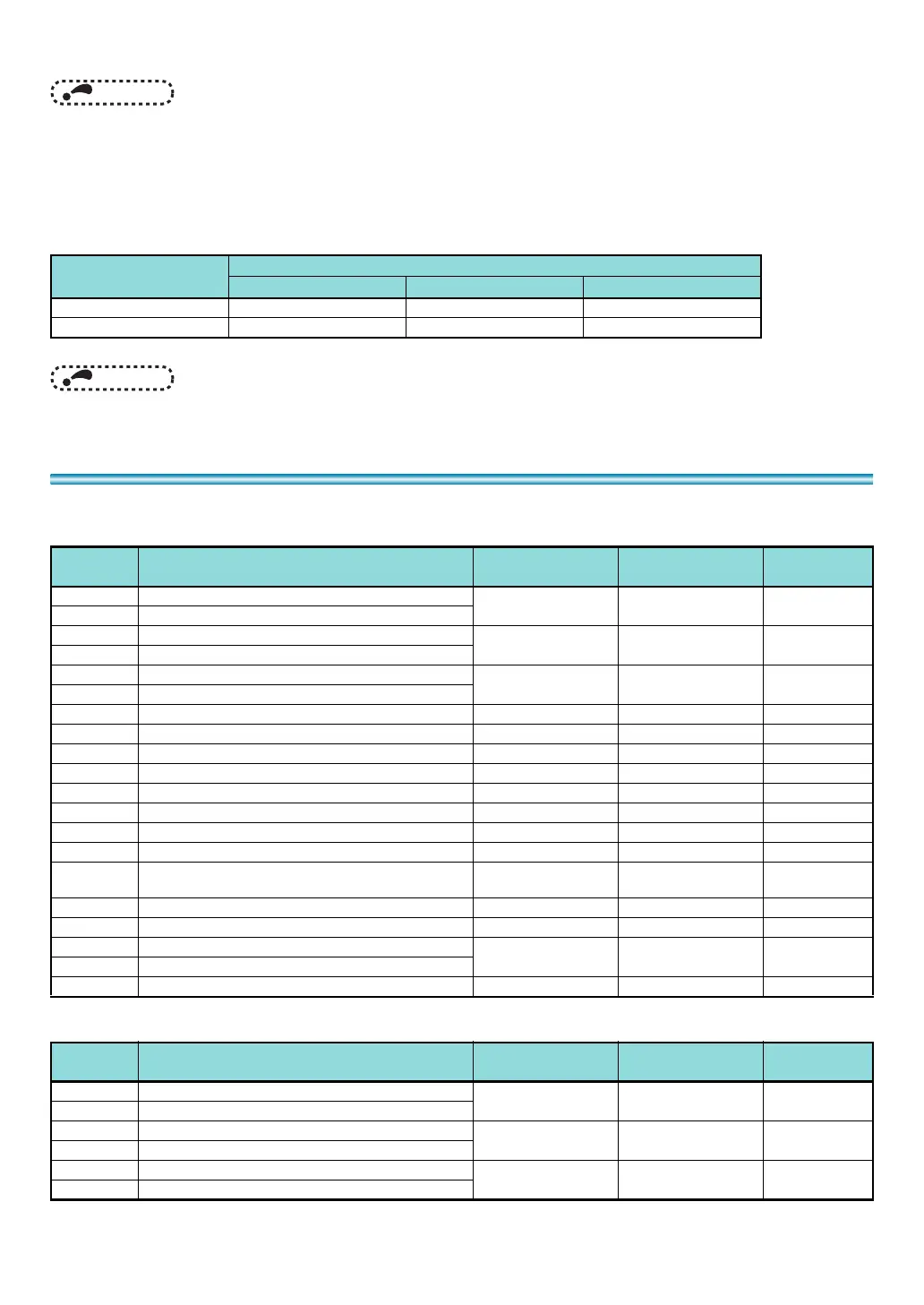
• The FR-A8APR supports the following control modes.
: Supported, : Not supported
NOTE
• For the details of the FR-A8APR, refer to the Instruction Manual of the FR-A8APR.
4 For customers using HMS network options
The following inverter monitor items are added or changed.
16-bit data
32-bit data
Motor with resolver
Vector control
Speed control Torque control Position control
Induction motor
PM motor
No. Description Unit Type
Read/
write
H001A Position command (lower 16 bits)
1 signed R
H001B Position command (upper 16 bits)
H001C Current position (lower 16 bits)
1 signed R
H001D Current position (upper 16 bits)
H001E Droop pulse (lower 16 bits)
1 signed R
H001F Droop pulse (upper 16 bits)
H0026 Trace status unsigned R
H0028 PLC function user monitor 1 unsigned R
H0029 PLC function user monitor 2 unsigned R
H002A PLC function user monitor 3 unsigned R
H0043 PID measured value 2 0.1% unsigned R
H0047 Cumulative pulse 1 signed R
H0048 Cumulative pulse carrying-over times 1 signed R
H0049 Cumulative pulse (control terminal option) 1 signed R
H004A
Cumulative pulse carrying-over times (control
terminal option)
1 signed R
H005F Second PID measured value 2 0.1% unsigned R
H0060 Second PID manipulated variable 0.1% signed R
H0064 Current position 2 (lower 16 bits)
1 signed R
H0065 Current position 2 (upper 16 bits)
H0066 PID manipulated variable 0.1% signed R
No. Description Unit Type
Read/
write
H0209 Current position 2 (lower 16 bits)
1 signed R/W
H020A Current position 2 (upper 16 bits)
H0211 Position command (lower 16 bits)
1 signed R
H0212 Position command (upper 16 bits)
H0213 Current position (lower 16 bits)
1 signed R
H0214 Current position (upper 16 bits)
BCN-C22005-697.fm 2 ページ 2015年1月8日 木曜日 午後8時37分

 Loading...
Loading...






