(T) Multi-Function Input Terminal Parameters
PARAMETERS
429
5
GROUP
T
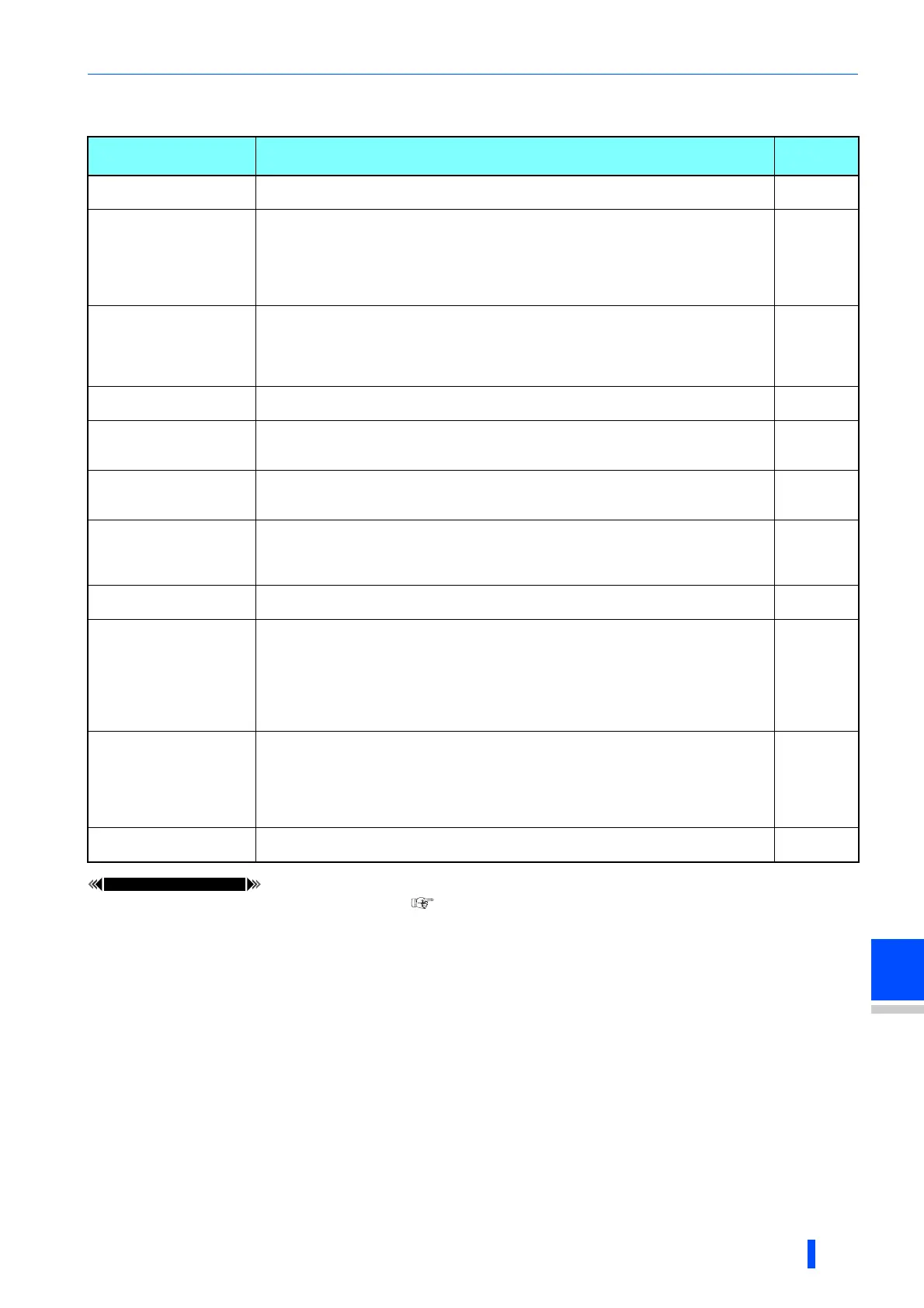
Function related to current input check
Pr.73 Analog input selection, Pr.267 Terminal 4 input selection page 406
Function Operation
Refer to
page
Minimum frequency
When the operation continues, setting of the minimum frequency against the running
frequency is valid even during the current input loss.
345
Multi-speed operation
The multi-speed setting signal is prioritized even during current input loss (operate according
to multi-speed setting even during operation in continuous frequency or during deceleration
stop).
When the multi-speed setting signal is turned OFF due to input current loss condition during
the multi-speed operation, it will perform deceleration stop even if it is set to continue
operation for current input loss.
328
JOG operation
JOG operation is prioritized even during current input loss (switch to JOB operation even
during operation with continuous frequency or during deceleration stop).
When the JOG signal is turned OFF due to input current loss condition during the JOG
operation, it will perform deceleration stop even if it is set to continue operation for current
input loss.
327
MRS signal
MRS signal is enabled even during current input loss (output is shut off with MRS signal ON
even during operation with continuous frequency or during deceleration stop).
433
Remote setting
During operation with remote setting and transferred to operation continuation due to input
current loss, acceleration, deceleration, and clear by the remote setting is invalid. They will
become valid after restoring the current input loss.
295
Retry function
When the protective function has operated during the operation continuation due to current
input loss, and retry was a success, operation will continue without clearing the operation
continuation frequency.
343
Added compensation,
override compensation
During operation with added compensation or override compensation and transferred to
operation continuation due to input current loss, added compensation and override
compensation will become invalid. They will become valid after restoring the current input
loss.
411
Input filter time constant
Current input loss is detected with the value before the filter.
Operation continuation before the input loss will use the value after the filter.
426
PID control
PID calculation is stopped during the current input loss. However, PID control will not be
disabled (normal operation).
During the pre-charge, end determination or fault determination by the pre-charge function
will not be performed when the current input loss occurs.
Sleep function is prioritized even during current input loss. When the clearing condition of the
sleep function is met during the current input loss, operation is restored with continuation
frequency.
501
Power failure stop
The power failure stop function is prioritized even if power failure current input loss is
detected.
Set frequency after the power failure stop and re-acceleration is the operation continuation
frequency at the current input loss.
When the E.LCI generation at the time of current input loss is selected, E.LCI will be
generated after the power failure stop.
540
Traverse function
Traverse operation is performed based on frequency even during the operation continuation
during current input loss.
484

 Loading...
Loading...






