Torque control under Real sensorless vector control and vector control
226
PARAMETERS
Using two types of gain (Pr.834, Pr.835)
• Use Pr.834 Torque control P gain 2, Pr.835 Torque control integral time 2 if the gain setting needs to be switched
according to application or if multiple motors are switched by a single inverter.
•The Pr.834 and Pr.835 settings are valid when the second function selection (RT) signal is ON.
NOTE
• The RT signal is a second function selection signal. The RT signal also enables other second functions. (Refer to page 434.)
• RT signal is assigned to the terminal RT in the initial status. Set "3" in any of Pr.178 to Pr.189 (input terminal function
selection) to assign the RT signal to another terminal.
Adjustment procedure
Adjust if any of phenomena such as unusual vibration, noise, current or overcurrent is produced by the motor or machinery.
1) Change the Pr.824 setting while checking the conditions.
2) If it cannot be adjusted well, change the Pr.825 setting, and perform 1) again.
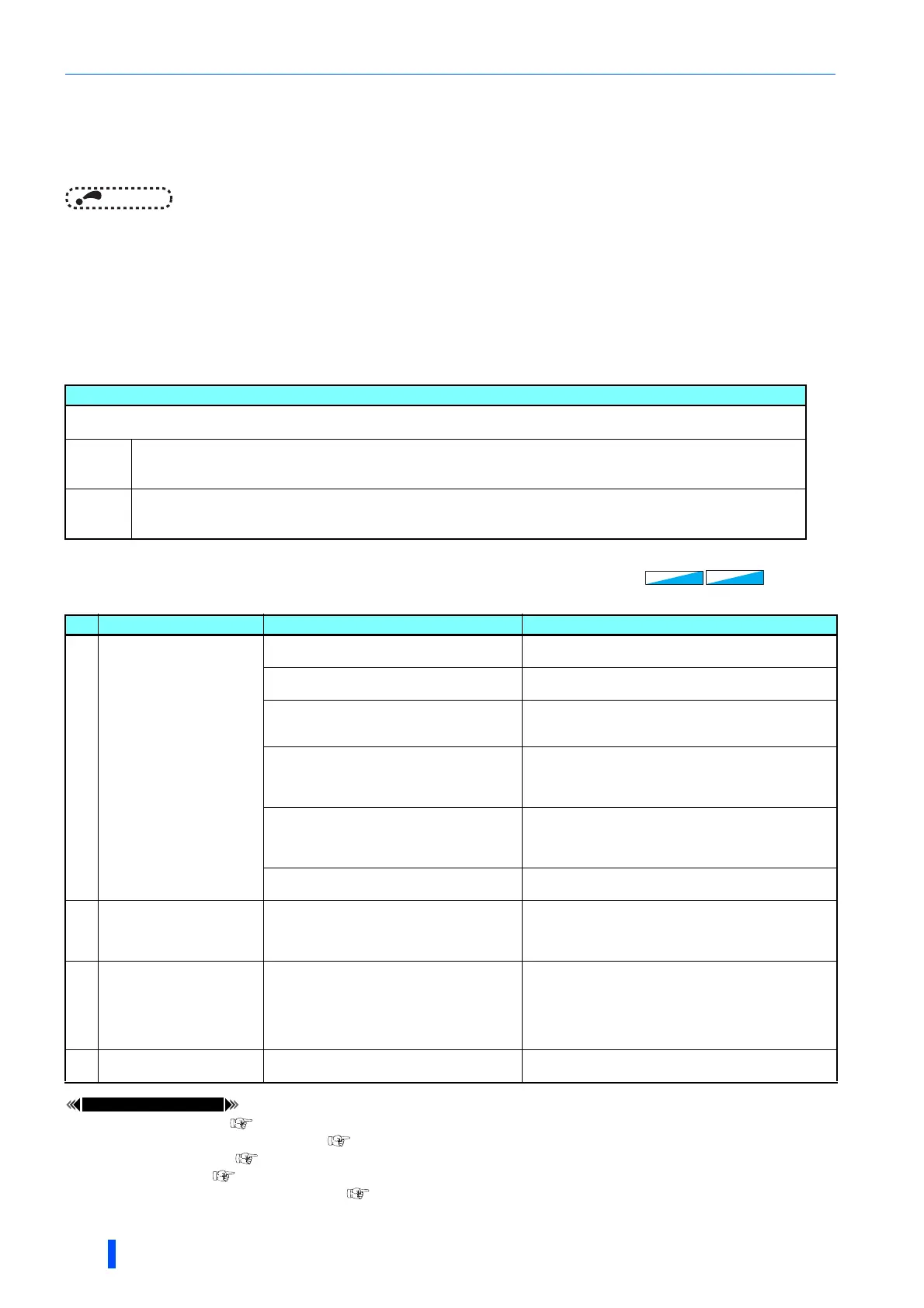
5.4.7 Troubleshooting in torque control
Pr.72 PWM frequency selection page 277
Pr.178 to Pr.189 (input terminal function selection) page 430
Pr.800 Control method selection page 164
Pr.807 Speed limit selection page 219
C16 to C19 (torque setting voltage (current) bias/gain) page 421
Adjustment method
Set Pr.824 lower and Pr.825 longer. First, lower Pr.824 and then check of there is still any abnormal vibration, noise or current from
the motor. If it still requires improvement, make Pr.825 longer.
Pr.824
Lower the setting by 10% increments and set a value that is approximately 0.8 to 0.9 times the setting value, immediately
before abnormal noise or current is improved.
If set too low, current ripple is produced and produces a sound from the motor that synchronizes with it.
Pr.825
Lengthen the current setting by doubling it each time and set a value that is approximately 0.8 to 0.9 times the setting
value, immediately before abnormal noise or current is improved.
If set too long, current ripple is produced and produces a sound from the motor that synchronizes with it.
Condition Cause Countermeasure
1
Torque control does not
operate properly.
• There is incorrect phase sequence between
the motor wiring and encoder wiring.
• Check the wiring. (Refer to page 65.)
• Pr.800 Control method selection setting
is applied.
• Check the setting of Pr.800. (Refer to page 164.)
• Speed limit value has not been input. • Set speed limit value. (If speed limit value is not input,
it becomes 0 Hz by default and the motor does not
run.)
• Torque command varies. • Check that the torque command sent from the
controller is correct.
•Set Pr.72 PWM frequency selection lower.
•Set Pr.826 Torque setting filter 1 higher.
• The torque command and the torque
recognized by the inverter are different.
• Re-calibrate the C16 Terminal 1 bias command
(torque), C17 Terminal 1 bias (torque), C18
Terminal 1 gain command (torque), and C19
Terminal 1 gain (torque). (Refer to page 421.)
• Torque fluctuation due to motor temperature
variation
• Select the magnetic flux observer by Pr.95 Online
auto tuning selection. (Refer to page 460.)
2
When a small torque
command is given, the
motor rotates in a direction
opposite to the start signal.
• Torque offset calibration is inaccurate. • Re-calibrate C16 and C17. (Refer to page 421.)
3
Torque control cannot
operate normally during
acceleration/deceleration.
The motor vibrates.
• Speed limit is operating.
(Speed limit may operate because the
speed limit value will increase or decrease
according to acceleration/deceleration time
setting of Pr.7 and Pr.8 when Pr.807="0 or
2".)
• Set the acceleration/deceleration time shorter.
Alternatively, set acceleration/deceleration time to "0".
(Speed limit during acceleration/deceleration is
determined by the speed limit for constant speed.)
4
Output torque is nonlinear
for the torque command.
Torque shortage Return Pr.854 Excitation ratio to the initial value.
Sensorless
Sensorless
Vector
Vector

 Loading...
Loading...






