710
APPENDIX
Appendix 2 Specification comparison between
PM sensorless vector control and
induction motor control
For the motor capacity, the rated motor current should be equal to or less than the rated inverter current. (It must be 0.4 kW or higher.)
If a motor with substantially low rated current compared with the rated inverter current is used, speed and torque accuracies may deteriorate due
to torque ripples, etc. Set the rated motor current to about 40% or higher of the rated inverter current.
NOTE
• Before wiring, make sure that the motor is stopped. Otherwise you may get an electric shock.
• Never connect an IPM motor to the commercial power supply.
• No slippage occurs with an IPM motor because of its characteristic. If an IPM motor, which took over an induction motor, is
driven at the same speed as for the general-purpose motor, the running speed of the IPM motor becomes faster by the
amount of the general-purpose motor's slippage. Adjust the speed command to run the IPM motor at the same speed as the
induction motor, as required.
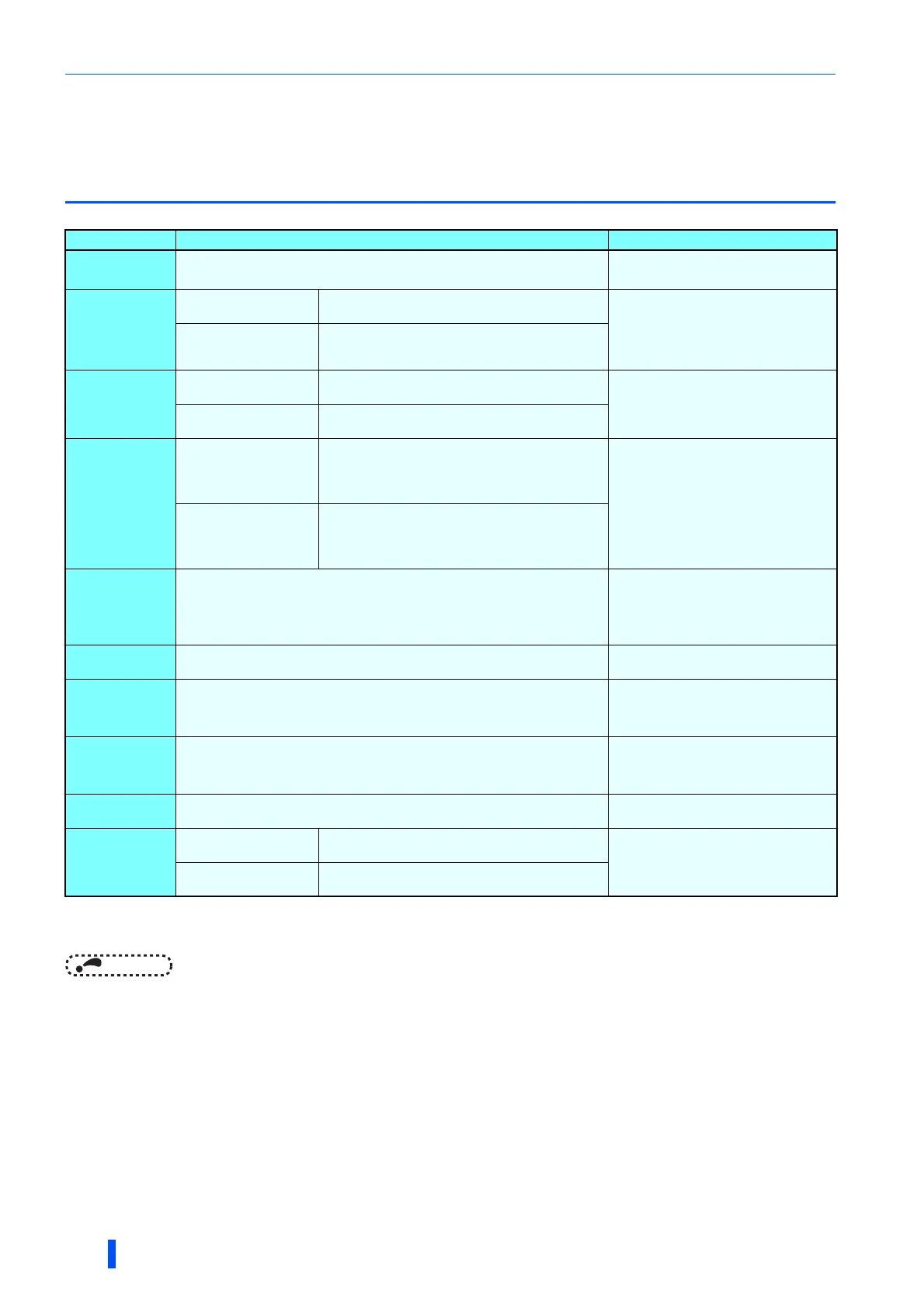
Item PM sensorless vector control (MM-CF) Induction motor control
Applicable
motor
IPM motor MM-CF series (0.5 to 7.0 kW) (Refer to page 694.)
IPM motors other than MM-CF (tuning required)
Induction motor
Starting
torque
High frequency
superposition control
200%(200% for the 1.5 kW or lower with MM-CF,
150% for the 2.0 kW or higher)
200% (FR-A820-00250(3.7K) or lower
and FR-A840-00126(3.7K) or lower)
150% (5.5K or higher)
under Real sensorless vector control
and vector control
Current synchronization
operation
50%
Zero speed
High frequency
superposition control
Available
(Select the HD rating for zero speed
200%.)
Available under Real sensorless vector
control and vector control
Current synchronization
operation
Not available
Carrier
frequency
High frequency
superposition control
6 kHz(Pr.72 = "0 to 9"), 10 kHz(Pr.72 = "10 to 13"),
14 kHz(Pr.72 = "14 or 15")
(6 kHz in a low-speed range of 10 kHz or higher.
2 kHz is not selectable.)
Any value in the range of 0.75 kHz to
14.5 kHz
(FR-A820-03160(55K) or lower and
FR-A840-01800(55K) or lower)
0.75 kHz to 6 kHz
(FR-A820-03800(75K) or higher and
FR-A840-02160(75K) or higher)
Current synchronization
operation
2 kHz(Pr.72 = "0 to 5"), 6 kHz(Pr.72 = "6 to 9"),
10 kHz(Pr.72 = "10 to 13"),
14 kHz(Pr.72 = "14 or 15")
(6 kHz in a low-speed range of 10 kHz or higher.)
Automatic
restart after
instantaneous
power failure
No startup waiting time.
Using the regeneration avoidance function or retry function together is
recommended.
Startup waiting time exists.
Startup delay
Startup delay of about 0.1 s for magnetic pole position detection.
No startup delay(when online auto
tuning is not performed at startup).
Driving by the
commercial
power supply
Cannot be driven by the commercial power supply.
Can be driven by the commercial
power supply.(Other than vector control
dedicated motor.)
Operation
during
coasting
While the motor is coasting, potential is generated across motor terminals.
While the motor is coasting, potential is
not generated across motor terminals.
Torque control
Not available
Available under Real sensorless vector
control and vector control.
Position
control
High frequency
superposition control
Available (sensorless)
Available under vector control.
Current synchronization
operation
Not available

 Loading...
Loading...






