Position control under vector control and PM sensorless vector control
PARAMETERS
239
5
Return to home position during point table positioning
• Home position return is performed to match the command coordinates with the machine coordinates.
• The returned home position can be set as point 0, and positioning operation is available using this.
• Home position return procedure
1) Set parameters related to home position return.
• Set the home position return method (Pr.1282).
• Set the speed for home position return operation (Pr.1283).
• Set the creep speed for home position return operation (Pr.1284).
• Set the home position return shift amount if necessary (Pr.1286 10000 + Pr.1285).
• Set the post proximity dog travel distance if necessary (Pr.1288 10000 + Pr.1287).
2) Turn OFF all point table selections.
• Turn OFF all RH, RM, RL and REX signals.
3) Turn ON the Pre-excitation/servo ON (LX) signal.
4) Turn ON the start signal (STF or STR).
• Home position return is performed according to the settings.
NOTE
• The setting values of the point table 1 are used as acceleration/deceleration time.
• After turning ON the start signal, only the setting values of Pr.1283 Home position return speed or Pr.1284 Home position
return creep speed can be changed.
Selecting the home position return method (Pr.1282 to Pr.1288)
Pr.1282
Setting
Home position
return method
Description
0
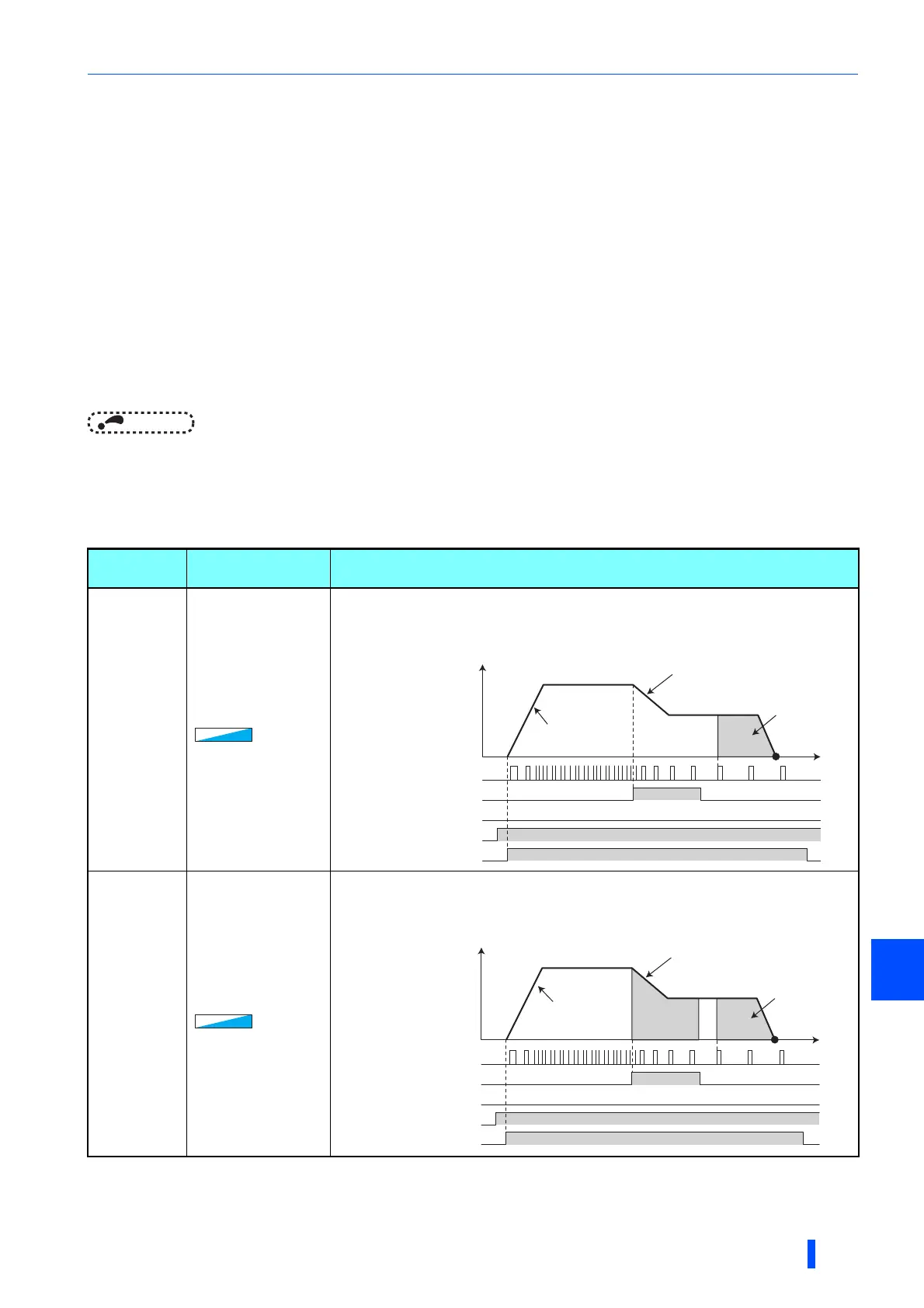
Dog type
Deceleration starts when the proximity dog signal is turned ON. For the home position after
turn OFF of the proximity dog signal, the position specified by the first Z-phase signal or the
position of the first Z-phase signal shifted by the home position shift amount (Pr.1285, Pr.1286)
is used.
1
Count type
Deceleration starts when the proximity dog signal is turned ON. After the proximity dog, the
motor travels the specified travel distance (Pr.1287, Pr.1288). Then, it uses the position
specified by the the first Z-phase signal or position of the Z-phase signal shifted by the home
position shift amount (Pr.1285, Pr.1286).
Vector
Vector
X76
Home
position
Point table 1
acceleration time
Proximity dog
Home position
return speed
Creep speed
Point table 1
deceleration time
LX
Z-phase
0
Position command
speed
Time
Home position
shift amount
STF
Point table selection signal
Vector
Vector
X76
Home
position
Point table 1
acceleration time
Home position
return speed
Creep speed
Point table 1
deceleration time
LX
Z-phase
Proximity dog
0
Position command
speed
Time
Home position
shift amount
Travel distance
after proximity
dog
STF
Point table selection signal

 Loading...
Loading...






