APPENDIX
731
Direct command mode for position control
• The point table is set as follows in the direct command mode. (The setting is applied when the start signal is turned ON.)
Same as point table 1. However, even when continuous operation is set in the auxiliary function, individual operation is applied.
The direct command mode is available only for individual operation. The dwell time is invalid.
• To perform positioning operation in the direct command mode, specify the point table (RH recommended) and turn ON the
start signal. (When no point table is specified, home position return operation is performed.)
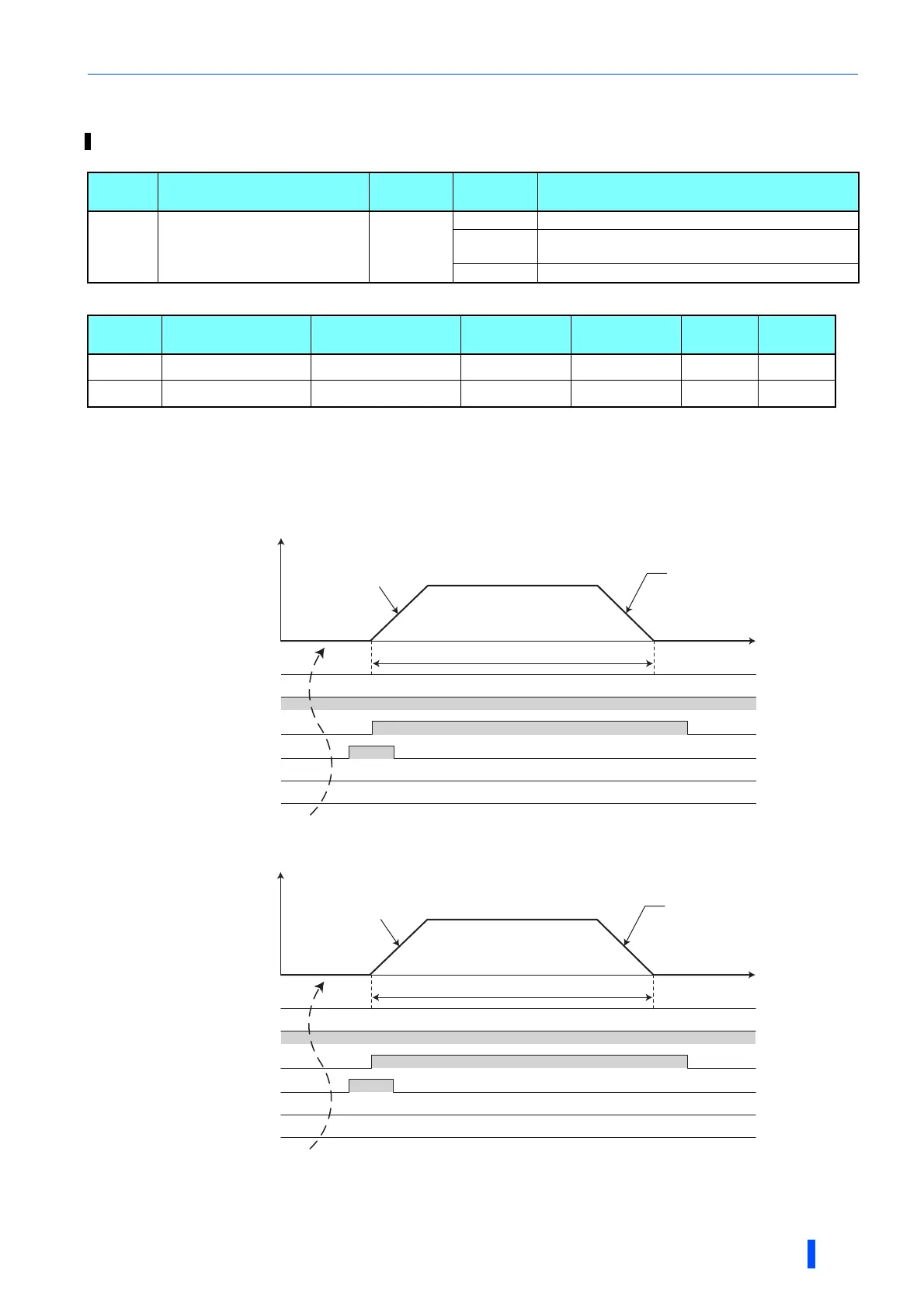
• Example when Pr.1220="1"
• Example when Pr.1220="2"
In the direct command mode, the target position and maximum speed can be set through communication.
Pr. Name
Initial
value
Setting
range
Description
1220
B100
Target position/speed
selection
0
0 Target position and maximum speed: Point table
1
Target position: Direct command
Maximum speed: Point table
2 Target position and maximum speed: Direct command
Pr.1220
setting
Target position Maximum speed
Acceleration
time
Deceleration
time
Dwell
time
Auxiliary
function
1 Direct command Point table 1 Invalid
2 Direct command Direct command Pr.7 Pr.8 Invalid
0
Maximum speed of point table 1
Time
Position command
speed
STF
ON
Acceleration time
of point table 1
Deceleration time
of point table 1
Target position
Target position of direct command0
Servo-ON
(LX)
ON
Direct command sent
RH
ON
RM
RL
OFF
OFF
0
Maximum speed of direct command
Time
Position command
speed
STF
ON
Acceleration time
of Pr.7
Deceleration time
of Pr.8
Target position
Target position of direct command0
Servo-ON
(LX)
ON
Direct command sent
RH
ON
RM
RL
OFF
OFF

 Loading...
Loading...






