(M) Monitor display and monitor output signal
394
PARAMETERS
Low speed detection (LS signal, Pr.865)
Speed detection hysteresis (Pr.870)
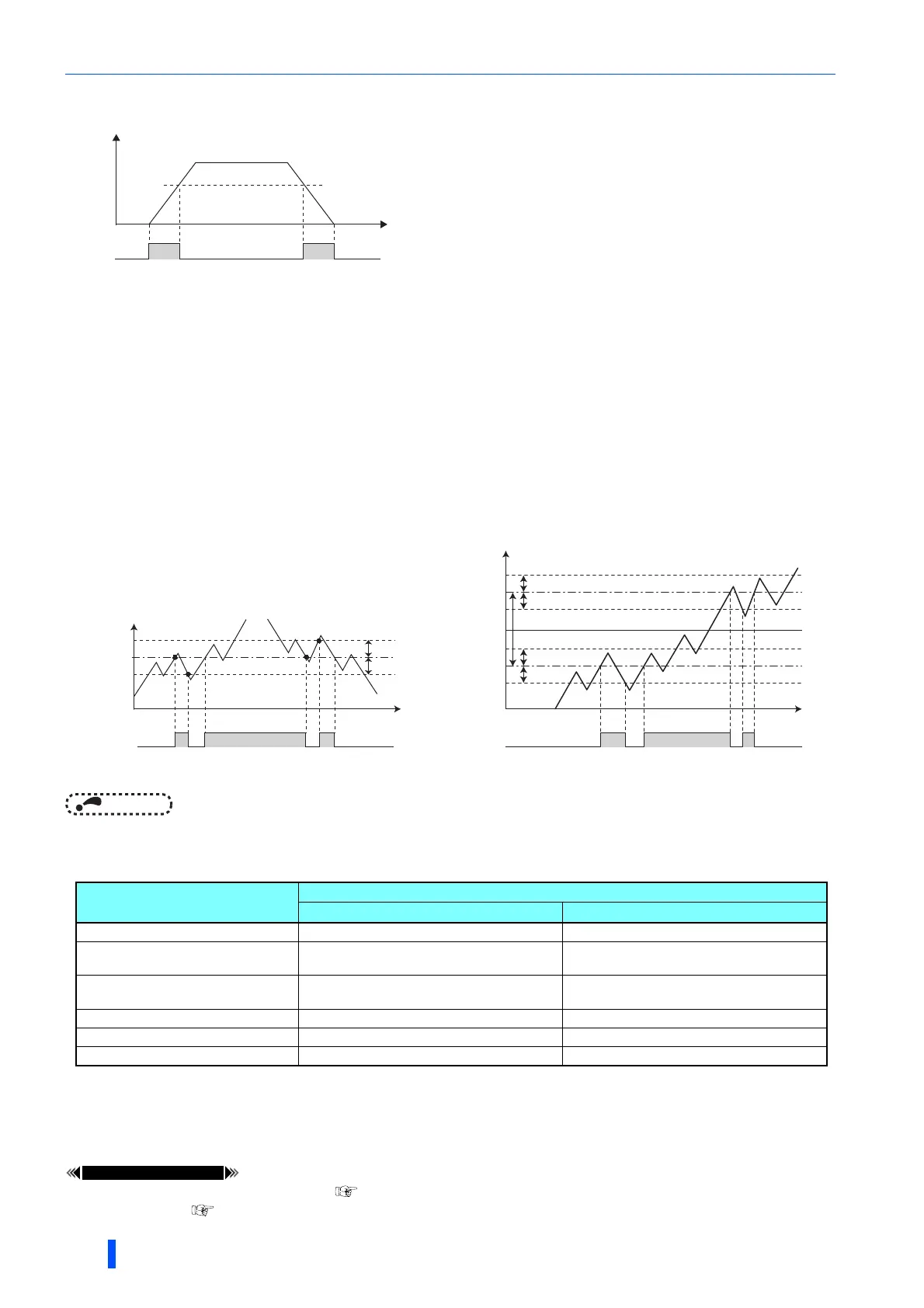
• This function prevents chattering of the speed detection signals. When an output frequency fluctuates, the following signals
may repeat ON/OFF (chatter).
Up to frequency signal (SU)
Speed detection signal (FB, FB2, FB3)
Low speed output signal (LS)
Setting hysteresis to the detected frequency prevents chattering of these signals.
NOTE
• In the initial setting, the FU signal is assigned to the terminal FU, and the SU signal is assigned to the terminal SU.
• All signals turn OFF during DC injection brake, pre-excitation (zero speed control, servo lock) and tuning at start-up.
• Each signal's reference frequency differs by the control method.
• Setting a higher value in Pr.870 slows the response of frequency detection signals (SU, FB, FB2, FB3, and LS).
• The ON/OFF logic for the LS signal is opposite for the FB signal.
• Changing the terminal assignment using Pr.190 to Pr.196 (output terminal function selection) may affect the other
functions. Set parameters after confirming the function of each terminal.
Pr.190 to Pr.196 (output terminal function selection) page 384
Pr.874 OLT level setting page 185
• When the output frequency (refer to the table below) drops to
the Pr.865 Low speed detection setting or lower, the low
speed detection signal (LS) is output.
• In speed control under Real sensorless vector control, vector
control or PM sensorless vector control, when the frequency
drops to the Pr.865 setting, the output torque exceeds the
Pr.874 OLT level setting setting, and this status continues
for 3 s, a fault (E.OLT) appears and the inverter output stops.
• For the LS signal, set "34 (positive logic) or 134 (negative
logic)" in any of Pr.190 to Pr.196 (output terminal function
selection) to assign the function to the output terminal.
Time
ONLS ONOFF
Pr.865
Output frequency
(Hz)
Output
frequency
(Hz)
Example of the speed detection (FB) signal
Pr.870
Pr.42
ON
ON
ON
FB
Pr.870
Pr.870
Pr.870
Pr.870
Pr.41
ON ON
ON
SU signal
SU output level
SU output level
Output frequency
(Hz)
Set frequency
Time
Example of the up to frequency (SU) signal
Control method
Compared frequency
FU, FU2, FU3 FB, FB2, FB3, SU, LS
V/F control Output frequency Output frequency
Advanced magnetic flux vector control
Output frequency before the slip
compensation
Output frequency before the slip
compensation
Real sensorless vector control Frequency command value
Estimated frequency (estimated from the
actual motor speed)
Encoder feedback control Actual motor speed converted as frequency Actual motor speed converted as frequency
vector control Frequency command value Actual motor speed converted as frequency
PM sensorless vector control Frequency command value Estimated frequency (actual motor speed)

 Loading...
Loading...






