Position control under vector control and PM sensorless vector control
PARAMETERS
249
5
Position command constant value during acceleration/deceleration
(Pr.424)
• If the electronic gear ratio is large (1:10 or larger) and the rotation speed is slow, the rotation is not smooth and the rotation
shape becomes like a pulse. Set this option in such a case to smoothen the rotation.
• If the command pulse frequency varies rapidly when no acceleration time can be assigned to the command pulse,
overshoot or excessive error alarms may occur. Set this option in such a case to set the acceleration/deceleration time.
Normally it is set to 0.
Pr.422 Position control gain page 251
5.5.7 Position adjustment parameter settings
In-position width (Pr.426, Y36 signal)
• The Y36 signal is used as the in-position signal.
• If the number of droop pulses is equal to or smaller than the Pr.426 setting value, the In-position (Y36) signal turns ON.
• To use the Y36 signal, set "36 (positive logic) or 136 (negative logic)" in any of Pr.190 to Pr.196 (output terminal function
selection) to assign the function.
Excessive error level (Pr.427)
• If the number of droop pulses exceeds the Pr.427 setting, a position error is detected, Excessive position fault (E.OD) is
activated and the inverter output is shut off. Increase the error threshold level when a small value is set as the Position
control gainsetting value. Set a small value for early detection even when the load is heavy.
• If Pr.427="9999" is set, E.OD is not activated regardless of the amount of droop pulses.
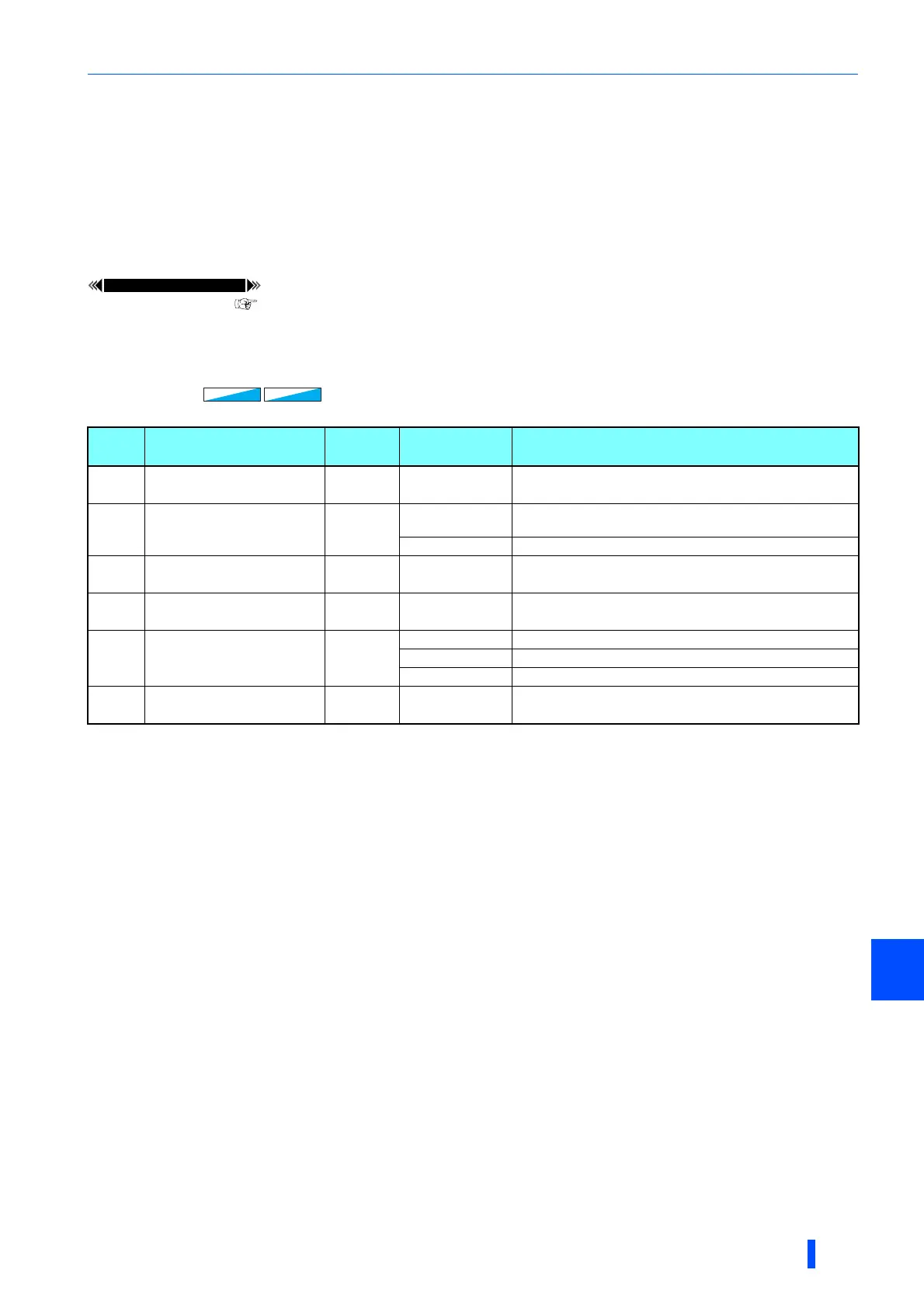
Pr. Name
Initial
value
Setting range Description
426
B007
In-position width
100 pulses 0 to 32767 pulses
Set the number of droop pulses that triggers the In-position
(Y36) signal.
427
B008
Excessive level error
40K
0 to 400K
Set the number droop pulses that activates Excessive
position fault (E.OD).
9999 Function invalid
1294
B192
Position detection lower
4 digits
0 0 to 9999 Set the lower four digits of the position detection value.
1295
B193
Position detection upper
4 digits
0 0 to 9999 Set the upper four digits of the position detection value.
1296
B194
Position detection
selection
0
0 The position is detected on both the plus and minus sides.
1 The position is detected on the plus side only.
2 The position is detected on the minus side only.
1297
B195
Position detection
hysteresis width
0 0 to 32767
Set the hysteresis width for the detection position of the
position detected signal (FP signal).
Vector
Vector
PM
PM

 Loading...
Loading...






