(A) Application parameters
532
PARAMETERS
NOTE
• If "2, 12" are set to Pr.162 when encoder feedback control is invalid, the automatic restart is with a frequency search (Pr.162
= "0, 10").
• In vector control, encoder detection frequency search is used regardless of the Pr.162 setting. The Pr.58 and Pr.299 settings
are invalid at this time.
• For the encoder feedback control, refer to page 626.
Restart at every start (Pr.162 ="10 to 13")
• When "10 to 13" is set in Pr.162, a restart operation is performed at each start and automatic restart after instantaneous
power failure (Pr.57 start after the reset time has elapsed). When "0 (initial value) to 3" is set in Pr.162, a restart operation
is performed at the first start after a power-ON, and from the second power-ON onwards, a start from the starting frequency
is performed.
Automatic restart operation of MRS (X10) signal
• The restart operation after restoration from output shutoff by the MRS (X10) signal is as shown in the table below according
to the Pr.30 setting.
NOTE
• When output is shut off using safety stop function (terminals S1 and S2), the inverter restarts in the same way as when output
is shut off by MRS (X10) signal.
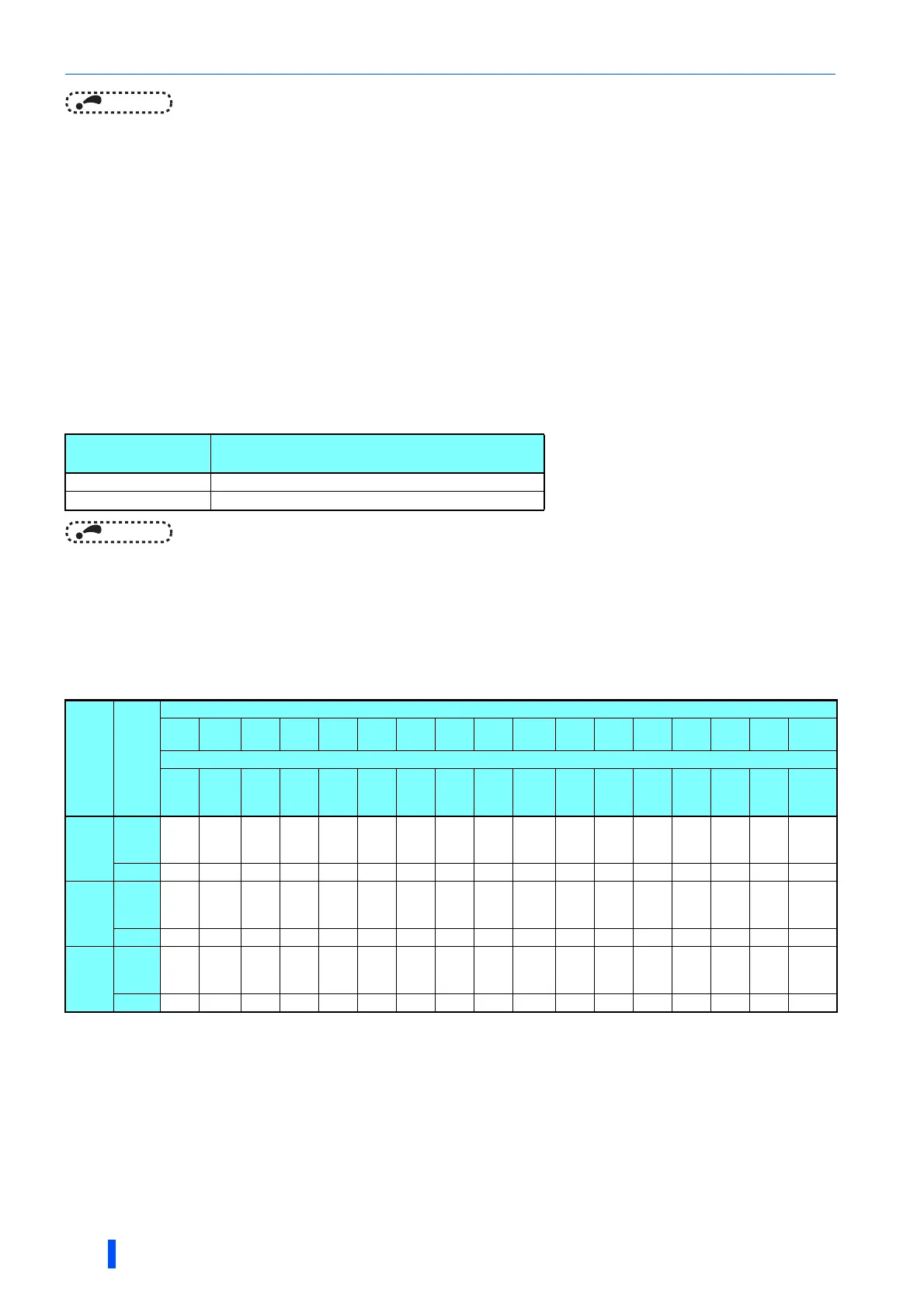
Adjustment of restart coasting time (Pr.57)
• Coasting time is the time from the motor speed detection to the restart operation start.
• To enable restart operation, set "0" to Pr.57 Restart coasting time. If "0" is set to Pr.57, the coasting time is automatically
set to the following value (Unit: s). Generally, this setting does not interfere with inverter operation.
• Inverter operation is sometimes hindered by the size of the moment of inertia (J) of the load or running frequency. Adjust
this coasting time within the range 0.1 s to 30 s to match the load specification.
• Set the waiting ti,e when the sine wave filter is used (Pr.72 PWM frequency selection = "25") to 3 s or more.
Restart cushion time (Pr.58)
• The cushion time is the time takes to raise the voltage to the level required for the specified speed after the motor speed
detection (output frequency before instantaneous power failure when Pr.162 = "1 or 11").
• Normally, the motor runs at the initial value as it is. However, adjust to suit the moment of inertia (J) of the load or the size
of the torque.
• Pr.58 is invalid under Real sensorless vector control or vector control.
Pr. 30 setting
Operation after restoration from output shutoff
by the MRS (X10) signal
2, 10, 11, 102, 110, 111 Restart operation (starting from the coasting speed)
Other than the above Starting from Pr.13 Starting frequency.
Pr.570
setting
Pr.162
setting
200 V class FR-A820-[]
00046
(0.4K)
00077
(0.75K)
00105
(1.5K)
00167
(2.2K)
00250
(3.7K)
00340
(5.5K)
00490
(7.5K)
00630
(11K)
00770
(15K)
00930
(18.5K)
01250
(22K)
01540
(30K)
01870
(37K)
02330
(45K)
03160
(55K)
03800
(75K)
04750
(90K)
400 V class FR-A840-[]
00023
(0.4K)
00038
(0.75K)
00052
(1.5K)
00083
(2.2K)
00126
(3.7K)
00170
(5.5K)
00250
(7.5K)
00310
(11K)
00380
(15K)
00470
(18.5K)
00620
(22K)
00770
(30K)
00930
(37K)
01160
(45K)
01800
(55K)
02160
(75K)
02600
(90K)
or
higher
0 (SLD)
1 (LD)
Other
than 3,
13
0.50.511113333 3333555
3, 1311 22223333 3333555
2 (ND)
Other
than 3,
13
0.50.50.51111333 3333355
3, 1311 12222333 3333355
3 (HD)
Other
than 3,
13
0.50.50.50.5111133 3333335
3, 1311 11222233 3333335

 Loading...
Loading...






